Séquence 9 : Pont roulant
Travail préparatoire
Il n'y aura pas de travail préparatoire pour cette séquence.
Environnement nécessaire pour le déroulement de la séquence
Présentation du système
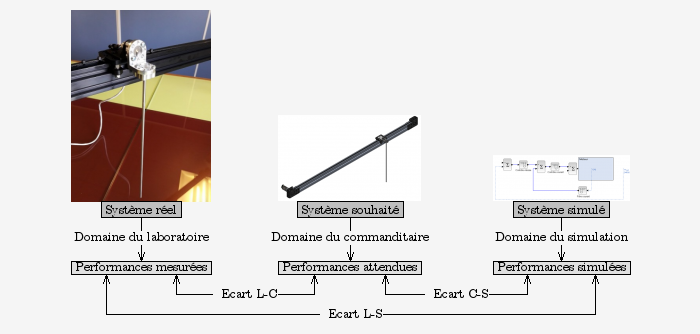
Domaine du commanditaire
Le système n'est pas dans le domaine du commanditaire. Le système a été à spécifiquement conçu à des fins pédagogiques.
Domaine du laboratoire

Le « Slider Cam / Pont Roulant » est un système basé sur un chariot à galets, motorisé par un moteur à courant continu intégrant un codeur incrémental.
Les caractéristiques mécaniques sont les suivantes :
- Rail en aluminium de longueur 1 mètre (ce qui donne une course d'environ 82 centimètre)
- Chariot en aluminium de dimension 50 * 50 * 6.35 millimètre
- Entraînement par courroie et poulie crantées
- Déplacement du chariot sur le rail par un système de quatre galets à roulement à billes
- Interrupteur de fin de course à chaque extrémité
Le chariot peut être équipé de deux ensembles :
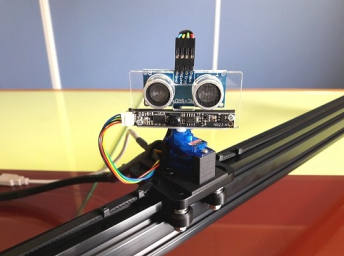
- une tourelle multi-capteurs pour les applications de type « Slider Cam »
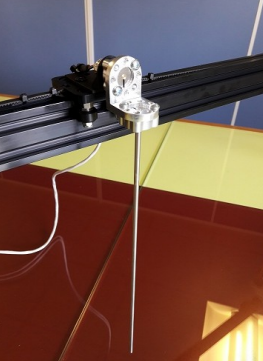
- une tige libre en rotation pour les applications de type « Pont Roulant »
 |
 |
|
Chariot en configuration « Slider Cam » (Equipé d'une Webcam et d'un capteur de distance à ultrason) |
Chariot en configuration « Pont Roulant » (Equipé d'une tige métallique pivotant autour d’un axe horizontal) |
Le pont roulant est fragile. Il est strictement interdit de manipuler/bloquer manuellement le chariot !
Problématique
Exigence fonctionnelle : Réaliser un asservissement en position
| Critère | Niveaux | Flexibilité | |
|---|---|---|---|
| Stabilité | Stable | - | Nulle |
| Robustesse | Marge de phase | \( M_{\varphi} = 45° \) | Faible |
| Précision | Erreur en régime permanent vis-à-vis d'une entrée en échelon | Nulle | Nulle |
| Erreur en régime permanent vis-à-vis d'une perturbation en échelon | Nulle | Nulle | |
| Rapidité | Temps de réponse à 5 % | Le plus rapide possible | Forte |
Démarche de l'ingénieur
Rôle de chacun des membres de l'équipe
Mission spécifique du groupe expérimentateur
Le groupe expérimentateur doit mettre en oeuvre les compétences suivantes :
Mission spécifique du groupe modélisateur
Le groupe modélisateur doit mettre en oeuvre les compétences suivantes :
Mission spécifique au groupe projet
Cela est l’occasion pour que le groupe expérimentateur et le groupe modélisateur confrontent leurs résultats et en tire les conclusions nécessaires sur la démarche de l’ingénieur.
Les groupes projet doivent mettre en oeuvre les compétences suivantes :
Organisation
Modélisation globale d'un système asservi
Nous vous mettons à disposition pour toute cette séquence :
Structure d'une partie de la boucle ouverte sur la chaîne d'action
A votre convenance, établir le schéma-bloc
- sous « Scilab / Xcos » à partir du fichier « scilabXcosBO.zcos ».
ou bien
- sous « Matlab /Simulink » à partir du fichier « matlabSimulinkBO.slx ». Nous vous mettons également à disposition cette aide pour Simulink.
L'entrée considérée sera la commande, c'est-à-dire, la tension aux bornes du moteur.
La sortie sera la grandeur physique à asservir, c'est-à-dire, la position.
Cependant la grandeur physique visualisée dans le modèle pourra être celle qui vous convient.
Les éléments déjà présents dans votre modèle causal vierge vous permet d'importer des résultats expérimentaux. Pour cela, vous devez
- mettre votre fichier de la mesure exporté dans le même répertoire que le fichier Jupyter « conversion.ipynb »
- renommer votre fichier de données sous le nom « donnees.txt » ou bien de modifier le code du fichier « conversion.ipynb ».
- exécuter « conversion.ipynb »
Que fait le fichier « conversion.ipynb » ? Il permet de
- convertir les données exportées en listes afin que vous puissiez les manipuler à votre convenance pour éventuellement extraire des informations qui vous sembleront utiles.
- afficher des courbes de quelques variables en fonction du temps
- convertir les données dans un format compatible avec « Scilab / Xcos » : scilabXcos.txt
- convertir les données dans un format compatible avec « Matlab /Simulink » : matlabSimulink.xls
Nous vous mettons à disposition le fichier Jupyter permettant d'afficher les données expérimentales exportées.
Déterminer le frottement sec et le frottement visqueux ramenés au moteur.
Déterminer le moment d'inertie équivalent ramené au moteur.
Des données peuvent être volontairement manquantes afin que vous établissiez vous même un modèle simplifié.
Déterminer tous les autres paramètres de votre schéma bloc à partir de la documentation technique.
Valider votre modèle en confrontant les résultats du modèle avec l'expérience.
Appeler votre professeur pour présenter le fruit de votre travail.
Structure de la boucle fermée
Compléter le schéma-bloc en rajoutant
- le capteur
- l'adaptateur de consigne
- le générateur de commande (correcteur) du type proportionnel
Montrer que l'on peut ramener votre schéma sous cette forme.

Cliquer sur l'image pour l'agrandir
Valider votre modèle en confrontant les résultats du modèle avec l'expérience.
Appeler votre professeur pour présenter le fruit de votre travail.
Faire une synthèse des performances actuelles et les comparer à celles du cahier des charges.
Amélioration des performances
Choisir un type de correcteur adapté
Proposer la démarche de réglage d'un correcteur proportionnel, proportionnel intégral ou bien à avance de phase.
Valider votre réglage sur le modèle.
Implanter votre réglage sur le système.
Le comportement est-il celui attendu ?