Séquence 5 : Control'X
Travail préparatoire
Environnement nécessaire pour le déroulement de la séquence
Présentation du système
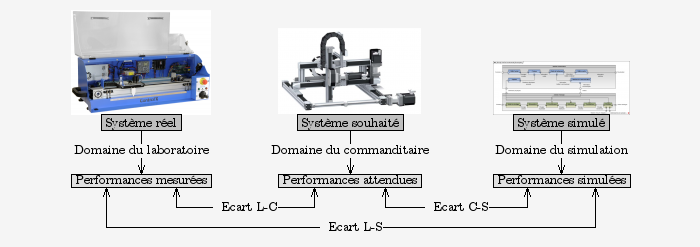
Domaine du commanditaire
|
Le système industriel dont est extrait Control'X est un robot portique 3 axes Lexium Max R du constructeur Schneider Electric. Ce robot portique permet d'apporter une solution fiable pour la manipulation de charges sur de longues distances : selon le modèle, des charges jusqu'à 50 kg peuvent être déplacées jusqu'à 5000 mm en \( X \), 1500 mm en \( Y \) et 1200 mm en \( Z \). L'entraînement de chaque axe est assuré par courroie crantée. Les guidages des chariots se font au choix par galets ou billes à recirculation. Ces robots portiques, commercialisés préassemblés, offrent différentes options de configuration pour chaque axe dont la longueur, le choix entre différentes tailles et types de profilés, le choix entre différents types de guidages ... |

|
L'application choisie pour contextualiser Control'X et celle du pick and place dans le domaine du placement de composants électroniques. Il s'agit d'un processus de précision consistant à positionner des composants électroniques sur des circuits imprimés. Le cœur de la machine est un portique 3 axes avec moteurs et servovariateurs pour obtenir des mouvements hautement dynamiques et une précision maximale.
Vous pouvez en voir différentes utilisations :
The New Pick and Place Machine
DIY Pick and Place speed update
Disc Tracking Machine - Motion control made by Schneider Electric
Xylophon machine - Motion control made by Schneider Electric
Domaine du laboratoire
|
Dans ce contexte d'utilisation, la particularité mécanique de Control'X tient au fait que les efforts extérieurs exercés sur l'axe sont nuls : le moteur sert uniquement à vaincre les efforts inertiels et les résistances passives internes au mécanisme.
Le moteur est souvent en prise directe avec la poulie motrice ou, s'il y a un réducteur, le rapport de réduction est généralement faible. L'axe linéaire commercialisé par DMS est une version didactique de l'axe industriel commercialisé par l'industriel Schneider. Il est en tout point identique à celui utilisé dans l'industrie en ce qui concerne sa partie mécanique : réducteur, poulies-courroie, chariot, guidages. |

|
Schneider, ne commercialise plus de moteur à courant continu à balais mais seulement des moteurs à courant continu sans balais. Ces moteurs brushless sont dans l'industrie en train de supplanter les moteurs à balais. Ils sont pilotés par des variateurs de vitesse spécifiques (série Lexium chez Schneider). Dans ces technologies brushless, le couple {variateur + moteur} n'est guère dissociable. Pour des questions de performance, chaque composant est en effet conçu de façon interdépendante.
Problématique
Démarche de l'ingénieur
Rôle de chacun des membres de l'équipe
Mission spécifique au groupe projet
Un groupe projet est composé d’un expérimentateur, d’un modélisateur travaillant conjointement.
Les groupes projet doivent mettre en oeuvre les compétences suivantes :
Analyser l’organisation fonctionnelle et structurelle
Proposer un modèle de connaissance et de comportement
Mettre en oeuvre une démarche de résolution analytique
Mettre en oeuvre un système
Proposer et justifier un protocole expérimental
Mettre en oeuvre un protocole expérimental
Produire et échanger de l’information
Chaîne d’information et chaîne de puissance sous forme d’un IBD
Nous vous mettons à disposition :
Moment d’inertie équivalente ramené à l’arbre du moteur
Vous prendrez soin à retirer les énergies cinétiques qui vous semblent négligeables.
Conclure
Rendement
On mène une étude dynamique par une approche énergétique avec la particularité de se placer dans la phase du régime permanent du mouvement.
Trouver la situation expérimentale où l'on a une régime permanent avec une puissance de sortie non nulle.
On isole tous les groupes cinématiquement équivalent en mouvement.
La puissance échangée entre deux éléments s'exprime, indépendamment du domaine considéré, comme le produit de deux variables complémentaires :
- une grandeur d'effort qui " tend " à déplacer une certaine quantité de matière (ou quelque chose qui en tient lieu)
- une grandeur de flux qui traduit le déplacement avec un certain " débit " d'une quantité de matière (ou quelque chose qui en tient lieu)
| Domaine | Effort | Flux |
|---|---|---|
| Mécanique de translation | Force en newton |
Vitesse en mètre par seconde |
| Mécanique de rotation | Couple en Newton par mètre |
Vitesse angulaire en radian par seconde |
| Électricité | Tension en volt |
Courant en ampère |
| Hydraulique, pneumatique | Pression en Pascal |
Débit volumique en mètre cube par seconde |
| Thermodynamique, thermique | Température en Kelvin |
Flux d'entropie en joule par Kelvin par seconde |
Localiser où se trouve les puissances non nulles deux questions précédentes sur la chaîne de puissance.
Mesurer la grandeur « effort » et la grandeur « flux » permettant de quantifier chacune de ces puissances non nulle.
Dans la mesure du possible, évaluer le rendement des composants de la chaîne de puissance en régime permanent.
Quantifier les pertes dans les constituants d’une chaîne de puissance.
- une courbe du rendement en fonction de la charge.
- une courbe de la puissance motrice en fonction de la charge.
Filtrage numérique
Moyenne mobile
Ce filtrage présente des inconvénients que dévoile la transformée de Fourier : le filtrage des fréquences par moyenne glissante est très irrégulier.
from numpy import mean
def moyenneMobile (l, n):
# Taille de la liste
taille = len (l)
# Créer une liste aussi grande que les données
resultat = [ None ]* taille
for i in range ( taille ):
# chercher les bornes de la sous liste dont on doit faire la moyenne
a, b = i - n, i + n + 1
# les bornes doivent compatible avec la liste
a, b = max (0, a), min(b, taille )
# Faire la moyenne
resultat [i] = mean (l[a:b])
return resultat
Médiane mobile
from numpy import median
def medianeMobile (l, n):
# Taille de la liste
taille = len (l)
# Créer une liste aussi grande que les données
resultat = [ None ]* taille
for i in range ( taille ):
# chercher les bornes de la sous liste dont on doit prendre la mé diane
a, b = i - n, i + n + 1
# les bornes doivent compatible avec la liste
a, b = max (0, a), min(b, taille )
# Prendre la mé diane
resultat [i] = median (l[a:b])
return resultat