Séquence 8 : Double commande moteur
Modélisation de l'asservissement de la vitesse de rotation du moteur
Modélisation
Donner, dans sa généralité, le schéma-blocs organique d'un système asservi.
Justifier que l'on puisse se ramener à ce schéma-blocs ci-dessous :
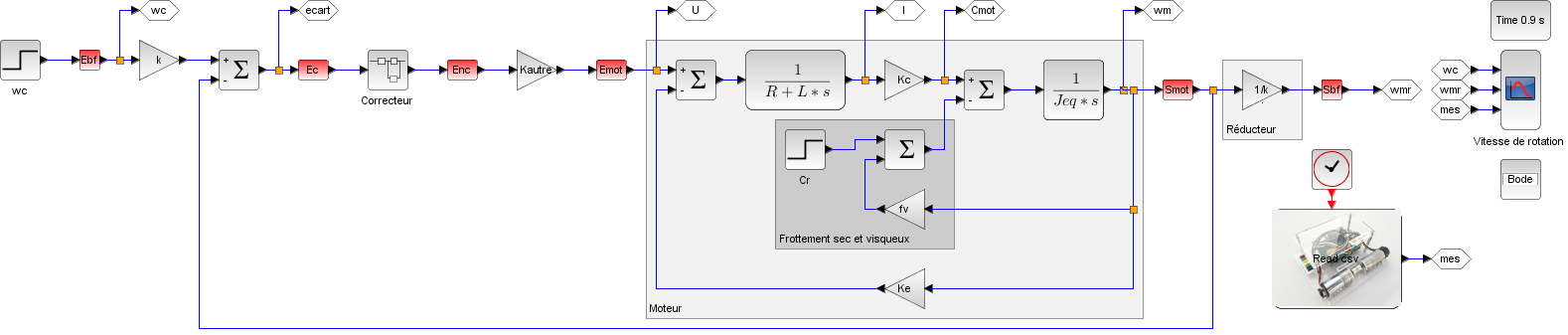
Cliquer sur l'image pour l'agrandir
La première chose à faire est de fermer la connexion en cliquant sur ON de Connexion au port série de Contrôle de l'application. L'interrupteur commute alors sur OFF.
Une led orange doit s'éteindre sur la platine.
Si vous ne réalisez pas cette étape, par la suite vous pourriez avoir des problèmes de communication.
Pour l'identification des composants de gain inconnu (hacheur, capteur, etc.), nous utiliserons l'asservissement en vitesse par le port série bien plus rapide que par le port réseau. Pour cela,
- Cliquer sur Ouvrir de Asservissement en vitesse série (acquisition rapide)
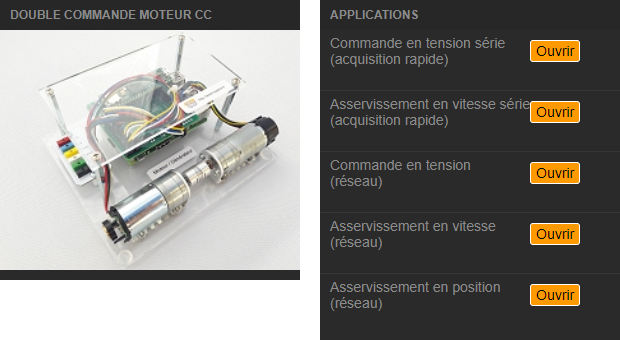
Noter que par la suite, il est possible de passer directement d’une application à une autre en utilisant la zone Applications intégrée dans chaque tableau de bord.
La procédure est la suivante :
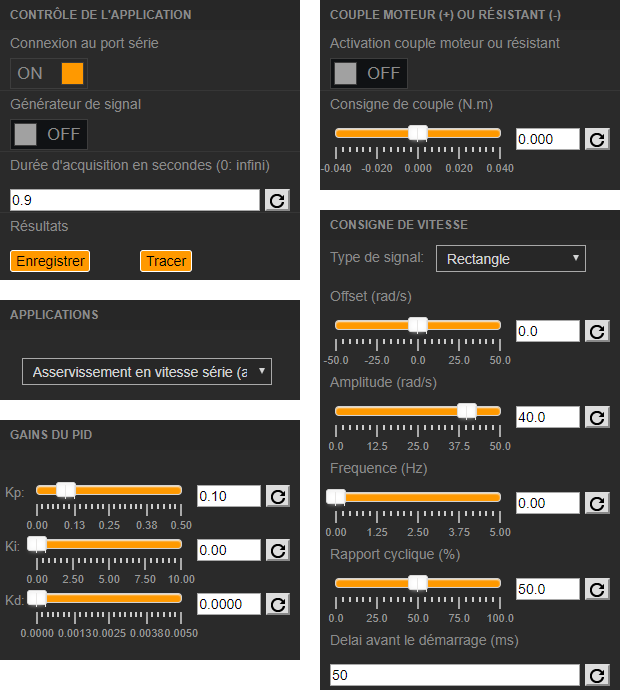
- Si cela n'est pas déjà fait, commuter sur ON le bouton de connexion au port série
- Choisir une durée d’acquisition de 0.9 s
- Choisir un signal de type Rectangle avec une amplitude de 40 rad/s et un délai avant le démarrage de 50 ms
- Régler le correcteur PID en correcteur proportionnel
- \( Kp = 0.1 \)
- \( Ki = 0 \)
- \( Kd = 0 \)
- Commuter le bouton du générateur de signal sur ON
Identifier le gain \( Kautre \) à partir de la mesure
- la tension de commande \( u(t) \)
- la vitesse de rotation du motoréducteur \( \omega_{mr}(t) \)
et à partir des informations
- la vitesse de rotation de consigne du motoréducteur \( \omega_c(t) \)
- du gain du correcteur \( K_p \)
Compléter votre schéma bloc.

Valider votre modèle
Commenter les écarts constatés
Amélioration / dégradation du comportement
En vue d’analyser les performances (la stabilité, la robustesse, la rapidité et la précision) avec ou sans l’effet de la perturbation de couple extérieur au motoréducteur, lancer des échelons de vitesse avec l'acquisition des courbes de vitesse, pour chacune des situations ci-dessous :
| Situation | \(Kp\) | \(Ki\) | \(Kd\) | couple extérieur | Nom du fichier |
|---|---|---|---|---|---|
| Correction proportionnelle sans perturbation |
0.05 | 0 | 0 | Désactivé | kp005ki000cr000.csv |
| 0.1 | kp010ki000cr000.csv | ||||
| 0.2 | kp020ki000cr000.csv | ||||
| 0.4 | kp040ki000cr000.csv | ||||
| Correction proportionnelle avec perturbation |
0.05 | 0 | 0 | Activé | kp005ki000cr001.csv |
| 0.1 | kp010ki000cr001.csv | ||||
| 0.2 | kp020ki000cr001.csv | ||||
| 0.4 | kp040ki000cr001.csv | ||||
| Correction proportionnelle intégrale sans perturbation |
0.1 | 0.1 | 0 | Désactivé | kp010ki001cr000.csv |
| 2 | kp010ki020cr000.csv | ||||
| 10 | kp010ki100cr000.csv | ||||
| Correction proportionnelle intégrale avec perturbation |
0.1 | 0.1 | 0 | Activé | kp010ki001cr001.csv |
| 2 | kp010ki020cr001.csv | ||||
| 10 | kp010ki100cr001.csv |
Pour cela, dans l'application Asservissement en vitesse série (acquisition rapide),
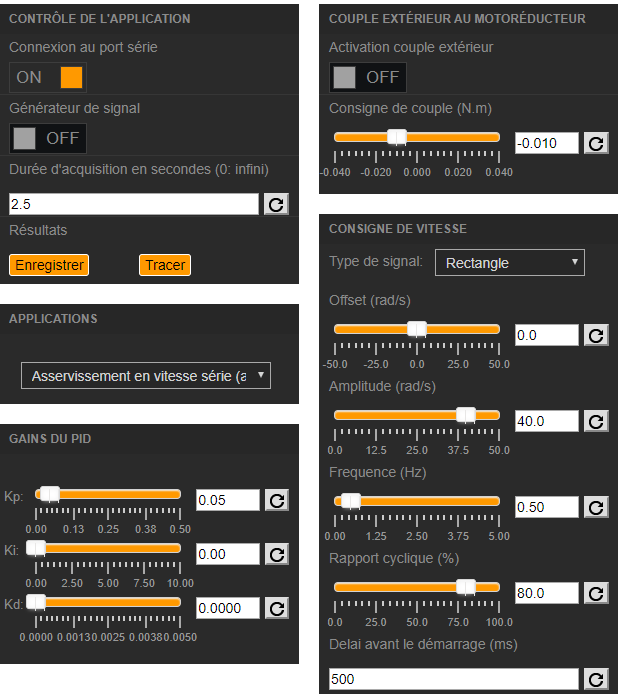
- Si cela n'est pas déjà fait, commuter sur ON le bouton de connexion au port série
- Choisir une durée d’acquisition de 2.25 s
- Choisir un signal de type Rectangle avec
- un offset de 0 rad/s
- une amplitude de 40 rad/s
- une fréquence de 0.5 Hz
- un rapport cyclique de 80%
- un délai avant le démarrage de 500 ms
- Régler le correcteur PID selon les différentes situations ci-dessus.
- Régler la consigne de couple à -0.01 N.m que l'on activera selon les besoins
- Commuter le bouton du générateur de signal sur ON quand vous êtes prêt
- Enregistrer l'expérience sous le nom du fichier imposé.
Afficher les courbes dans la situation Correction proportionnelle avec et sans perturbation.
Commenter l'évolution des performances au cause de la présence de la perturbation.
Afficher les courbes dans la situation Correction proportionnelle
Commenter l'évolution des performances grâce l'augmentation du gain du correcteur proportionnel.
Afficher les courbes dans la situation Correction proportionnelle intégrale.
Commenter l'évolution des performances grâce à l'introduction de l'intégrateur dans le correcteur proportionnel.
Le cours à venir sur les correcteurs fera la synthèse de vos observations.
A la suite de ce cours, nous irons plus loin en proposant et en mettant en œuvre une démarche de réglage d’un correcteur.