Séquence 8 : Double commande moteur
La procédure est la suivante :
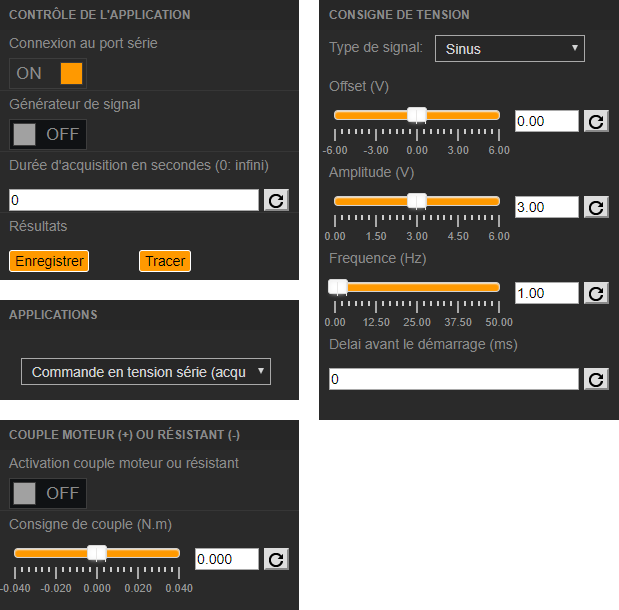
- Si cela n'est pas déjà fait, commuter sur ON le bouton de connexion au port série
- Choisir une durée d’acquisition de 0 s
- Choisir un signal de type Sinus avec une amplitude de 3 V, une fréquence de 1 Hz et un délai avant le démarrage de 0 ms
- Commuter le bouton du générateur de signal sur ON
- Commuter le bouton du générateur de signal sur OFF une fois que les courbes commencent à défiler (le temps de réponse ne doit plus apparaitre sur la courbe)
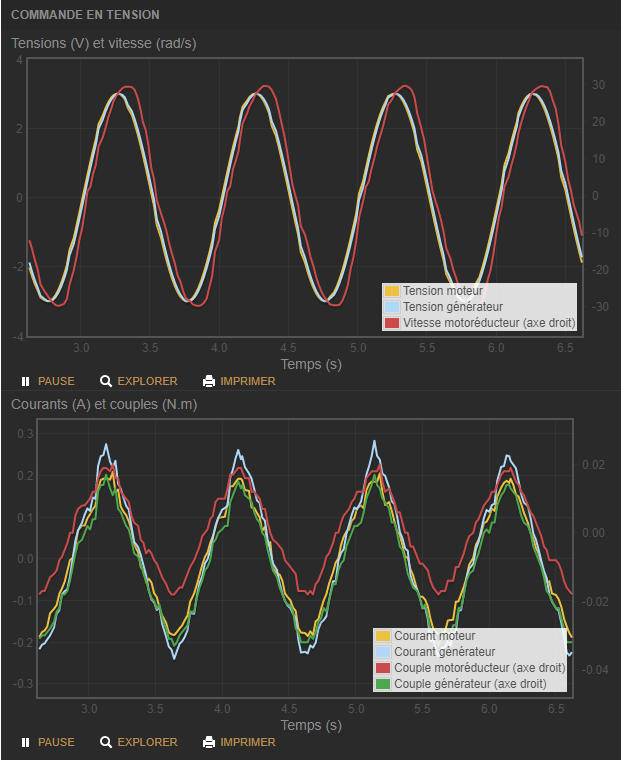
Compléter, avec les relevés expérimentaux, les variables :
wm: la pulsation mesuréegainm: le gain mesuréphasem: le déphase mesuré
Valider votre modèle
Commenter les écarts constatés