Séquence 8 : Double commande moteur
Identification des caractéristiques du motoréducteur
La résistance \( R \)
l'inductance \( L \)
Cette identification se fait le rotor bloqué en tenant à la main la roue aimantée du codeur incrémental du codeur. Prenez garde à ne pas toucher le capteur effet hall.
La procédure est la suivante :
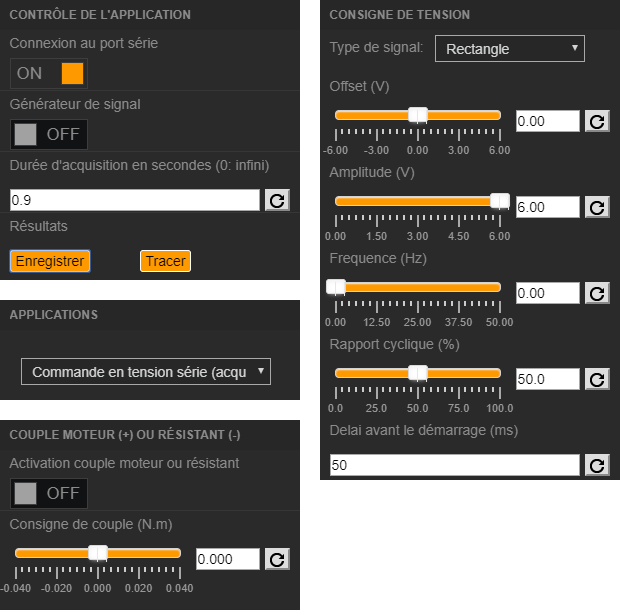
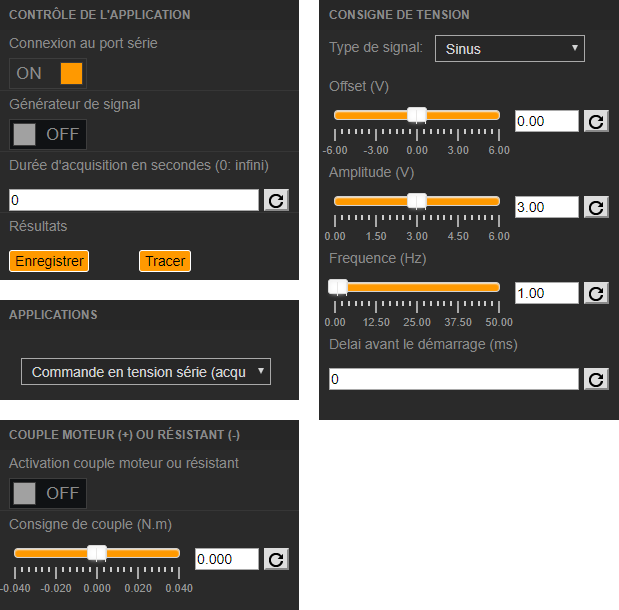
- Si cela n'est pas déjà fait, commuter sur ON le bouton de connexion au port série
- Choisir une durée d’acquisition de 0.01 s
- Choisir un signal de type Rectangle avec une amplitude de 3.75 V (c’est la moitié de la tension d’alimentation du système) et un délai avant le démarrage de 2 ms
- Tenir fixe la roue du codeur en la pinçant fortement mais sans s'appuyer sur le capteur à effet hall
- Commuter le bouton du générateur de signal sur ON

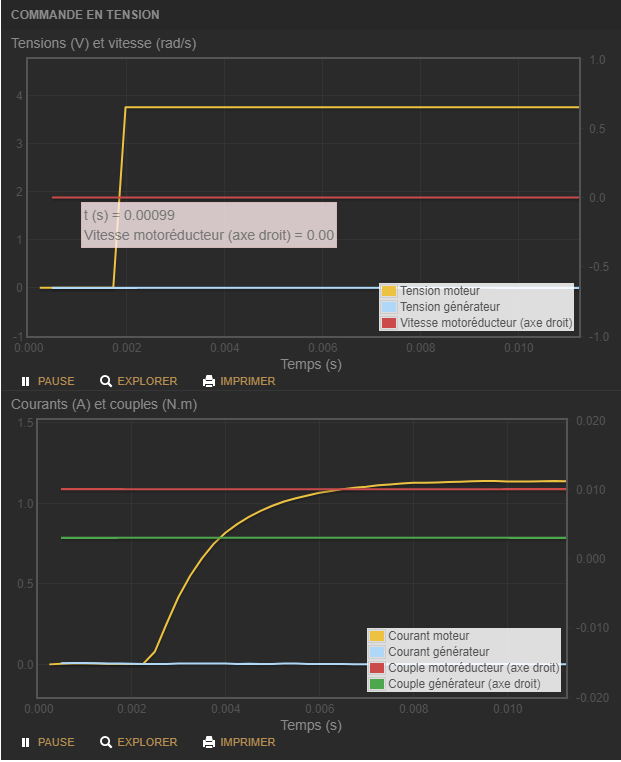
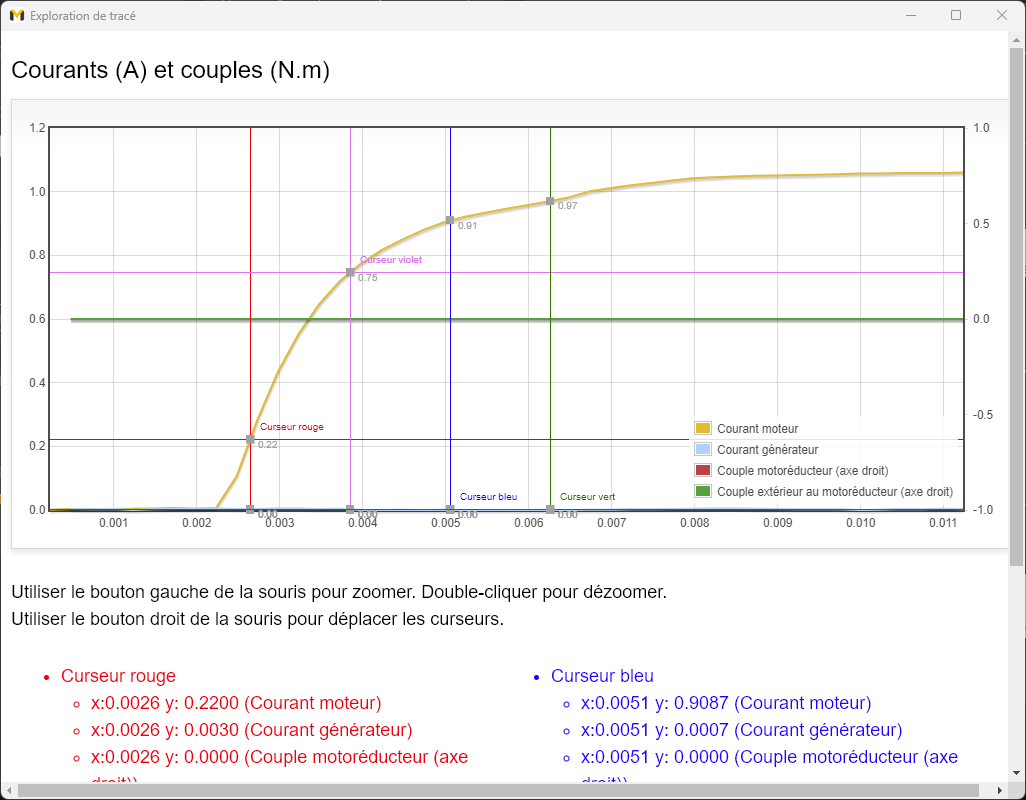
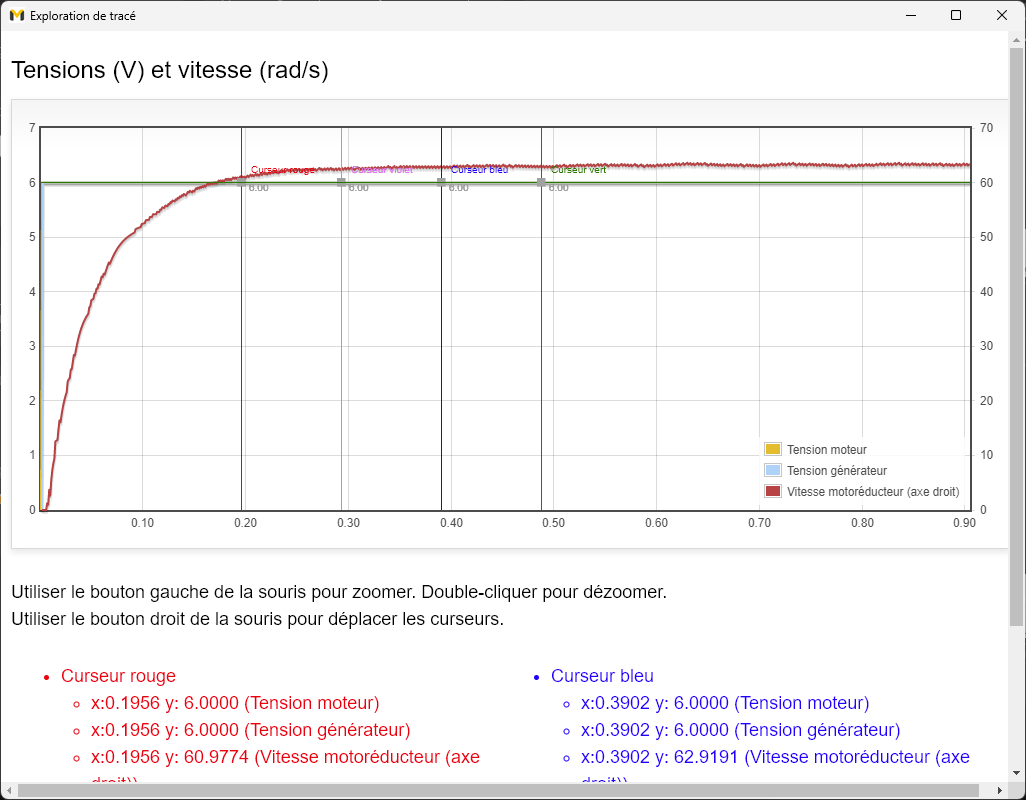
Nous vous invitons à cliquer sur le bouton " EXPLORER " pour extraire rapidement des informations sur les courbes.
Enregistrer les données sous le nom RL.csv dans le dossier que vous avez choisi en cliquant sur le bouton Enregistrer dans Contrôle de l'application.
Constante de force contre électromotrice \( K_e \)
Constante de couple \( K_c \)
Cette identification se fait le rotor libre, sur une période de temps plus longue.
Il est inutile de désaccoupler le moteur du générateur. En effet, le générateur est piloté de manière à ne pas être ressenti par le moteur.
- Si cela n'est pas déjà fait, commuter sur ON le bouton de connexion au port série
- Choisir une durée d’acquisition de 0.9 s
- Choisir un signal de type Rectangle avec une amplitude de 6 V et un délai avant le démarrage de 50 ms
- Commuter le bouton du générateur de signal sur ON
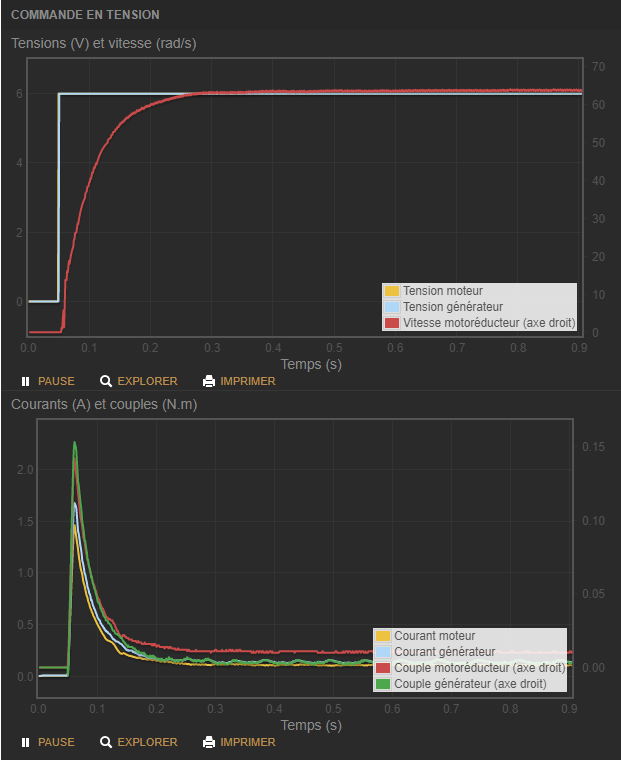
Nous vous invitons à cliquer sur le bouton " EXPLORER " pour extraire rapidement des informations sur les courbes.
- Enregistrer les données sous le nom Ke.csv en cliquant sur le bouton Enregistrer dans Contrôle de l'application
Dans les moteurs modernes, \( K_c = K_e \) en terme de grandeur. Les unités ne sont pas comparables.
Identification du frottement sec et du frottement visqueux
Cette identification nécessite la réalisation de plusieurs essais (identique de l'expérience précédente) avec plusieurs tensions d’alimentation différentes (1V, 2V, 3V, 4V, 5V et 6V).
Vous nommerez les différents fichiers CrFvi.csv avec \( i \) la tension appliquée au moteur.
Par exemple pour l'expérience avec une tension de 1 volt, nous nommerons le fichier CrFv1.csv.
Vous pouvez, éventuellement, faire plusieurs fois le même essai mais cette fois-ci vous nommerez votre fichier CrFvi-j.csv avec \( i \) la tension appliquée au moteur et \( j \) le numéro de l'expérience à cette tension.
Couple de frottement visqueux
Coefficient de frottement sec
A partir des expériences précédentes, déterminer le courant de seuil \( i_0 \).
En déduire le couple de frottement sec \( C_r \) associé.
- Si cela n'est pas déjà fait, commuter sur ON le bouton de connexion au port série
- Choisir une durée d’acquisition de 0 s
- Choisir un signal de type Rectangle avec une amplitude de 0 V et un délai avant le démarrage de 0 ms
- Commuter le bouton du générateur de signal sur ON
- Augmenter petit à petit la tension de commande jusqu'à ce que le rotor se mette en mouvement
Déterminer expérimentalement le courant de seuil \( i_0 \) à partir de l'expérience précédente.
En déduire le couple de frottement sec \( C_r \) associé.
- Si cela n'est pas déjà fait, commuter sur ON le bouton de connexion au port série
- Choisir une durée d’acquisition de 0 s
- Choisir un signal de type Rectangle avec une amplitude de 1 V et un délai avant le démarrage de 0 ms
- Commuter le bouton du générateur de signal sur ON
- Diminuer petit à petit la tension de commande jusqu'à ce que le rotor s'immobilise
Déterminer expérimentalement le courant de seuil \( i_0 \) à partir de l'expérience précédente.
En déduire le couple de frottement sec \( C_r \) associé.
Nous vous invitons à faire une recherche bibliographique sur le frottement sec statique et dynamique.
Le modèle de " Coulomb, sec et visqueux " peut se représenter ainsi :
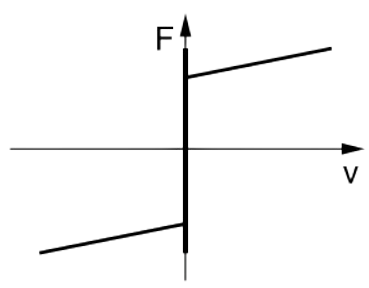
On pourrait se pose la question de " Où se trouve les différents couples de frottement évoqués précédemment ? "
Identification du moment d'inertie équivalente
Validation du modèle par la réponse temporelle
- Récupérer les résultats expérimentations pour une commande de 6V.
- Utiliser le fichier
 conversionCommandeEnTension_Serie.ipynb (pour scilab ou pour MatLab) pour convertir les résultats expérimentaux en données compatibles le modèle causal choisi.
conversionCommandeEnTension_Serie.ipynb (pour scilab ou pour MatLab) pour convertir les résultats expérimentaux en données compatibles le modèle causal choisi. - Ouvrir votre modèle causal et saisir vos constantes caractéristiques
Valider votre modèle
Commenter les écarts constatés
Validation du modèle par la réponse fréquentielle
La procédure est la suivante :
- Si cela n'est pas déjà fait, commuter sur ON le bouton de connexion au port série
- Choisir une durée d’acquisition de 0 s
- Choisir un signal de type Sinus avec une amplitude de 3 V, une fréquence de 1 Hz et un délai avant le démarrage de 0 ms
- Commuter le bouton du générateur de signal sur ON
- Commuter le bouton du générateur de signal sur OFF une fois que les courbes commencent à défiler (le temps de réponse ne doit plus apparaitre sur la courbe)
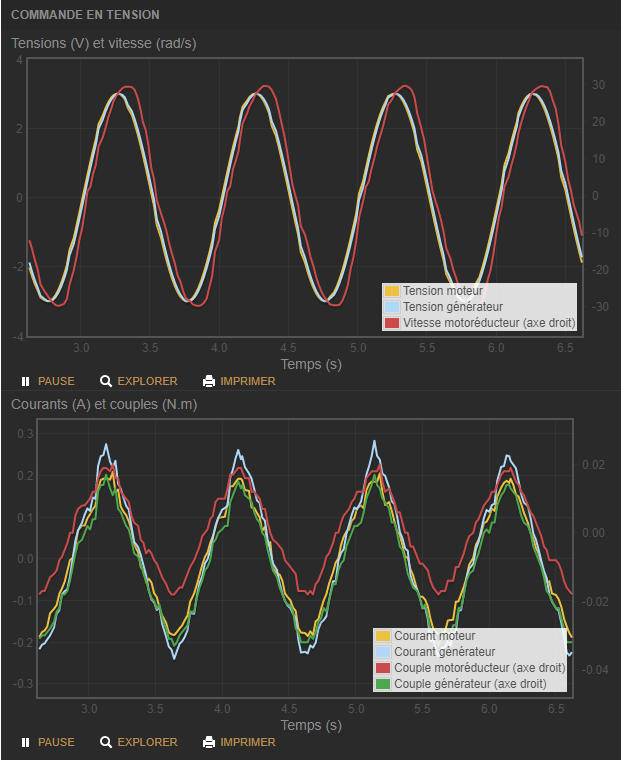
Compléter, avec les relevés expérimentaux, les variables :
wm: la pulsation mesuréegainm: le gain mesuréphasem: le déphase mesuré
Valider votre modèle
Commenter les écarts constatés