Séquence 8 : Double commande moteur
Présentation du système
Domaine du commanditaire
|
Le robot Geeros pcDuino est un robot gyropode d'exploration. Il intègre une liaison Wi-Fi vous permettant de le piloter à distance à partir d'un ordinateur, d'un smartphone ou d'une tablette. Il embarque une Webcam capable de faire de la transmission vidéo en temps-réel des images prises par le robot. Le robot est fragile. Il est à manipuler avec le plus grand soin ! |
|

Domaine du laboratoire
La motorisation du robot Geeros a été extraite pour être implantée sur une platine.
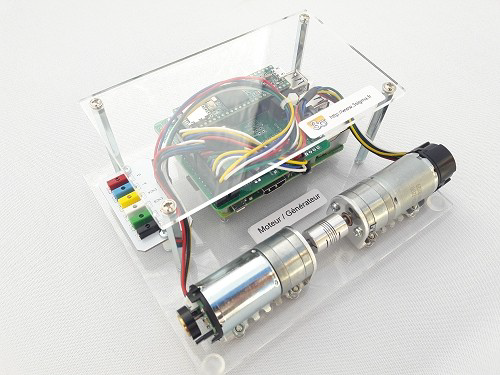
Ce système, basé sur une carte Raspberry Pi associée à une carte micro-contrôleur Teensy 3.6 montée sur un shield de commande moteur, permet de réaliser différentes expériences de commande de deux machines à courant continu avec codeur incrémental associé, identiques, l’un fonctionnant en moteur et l’autre en générateur de couple.
En absence de commande de génération de couple par le générateur, le générateur est piloté de manière à ce qu'elle ne soit pas ressentie par le moteur. En fin de compte, dans cette situation, si l'on désaccouplait le générateur du moteur, le moteur a exactement le même comportement et nous pouvons considérer que le générateur n'est pas présent !