Séquence 4 : Robot Geeros
Travail préparatoire
Pour répondre aux questions posées ci-dessous, nous vous invitons à faire une recherche sur internet. Gardez un esprit critique sur ce que vous pouvez lire.
Comment localiser un centre d'inertie ?
Nous ferons l'hypothèse que, dans toutes les pièces que nous étudierons, le champ de pesanteur est uniforme.
A partir de la définition du centre de gravite \(G\), nous savons que :
\( \int_{\mathbb{D}} \overrightarrow{GM} \wedge \overrightarrow{g} \cdot \mathrm{d}m = \overrightarrow{0} \)
Avec l'hypothèse formulée ci-dessus, on peut écrire
\( \int_{\mathbb{D}} \overrightarrow{GM} \cdot \mathrm{d}m \wedge \overrightarrow{g} = \overrightarrow{0} \)
\( \int_{\mathbb{D}} \overrightarrow{GM} \cdot \mathrm{d}m = \overrightarrow{0} \)
On rappelle la définition du centre d'inertie \( G \) :
\( \int_{\mathbb{D}} \overrightarrow{GM} \cdot \mathrm{d}m = \overrightarrow{0} \)
De ce fait, nous pourrons nous affirmer que le centre d'inertie et le centre de gravité sont confondus si le champ de pesanteur est uniforme dans la pièce.
Comment mesurer un moment d'inertie ?
Comment peut on mesurer un moment d'inertie d'un solide de révolution.
Préciser sur chaque expérience proposée si cela nécessite une condition sur le centre d'inertie, les autres moments d'inertie ou les produits d'inertie.
Comment peut on mesurer un moment d'inertie d'un solide n'ayant pas un solide de révolution.
Préciser sur chaque expérience proposée si cela nécessite une condition sur le centre d'inertie, les autres moments d'inertie et les produits d'inertie.
Environnement nécessaire pour le déroulement de la séquence
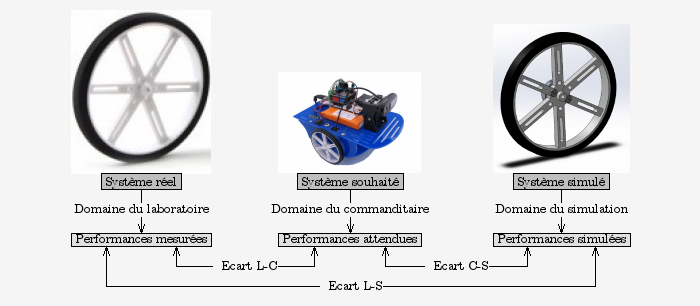
Présentation du système
Domaine du commanditaire
|
Le robot " Geeros pcDuino " est un robot gyropode d'exploration. Il intègre une liaison Wi-Fi vous permettant de le piloter à distance à partir d'un ordinateur, d'un smartphone ou d'une tablette. Il embarque une Webcam capable de faire de la transmission vidéo en temps-réel des images prises par le robot. Le robot est fragile. Il est à manipuler avec le plus grand soin ! |
|

Domaine du laboratoire
Il est identique au domaine du commanditaire.
On peut le mettre en oeuvre, voici les étapes de mise en route :
- posez-le parterre, posé sur l'avant
- basculez l'interrupteur de mise sous tension
- il se redresse tout seul et c'est parti ! Geeros ne tombe pas, même si vous le bousculez (pas trop violemment quand même !)
Vous pouvez alors vous amuser ! Vous pourrez piloter le robot à distance et avoir un retour vidéo en temps-réel, le tout en utilisant un simple navigateur Web sur votre ordinateur ou votre smartphone :
- connectez-vous au réseau Wifi "Geeros" avec le mot de passe "geerospcduino"
- ouvrez votre navigateur sur l'adresse http://192.168.0.199 avec votre ordinateur, votre smartphone ou votre tablette
- pilotez Geeros via un joystick virtuel (ordinateur) ou en inclinant votre smartphone* vers l'avant ou l'arrière (pour avancer ou reculer), à doite ou à gauche (pour tourner)
Problématique
Déterminer des éléments d’inertie utiles à l’étude du comportement dynamique du système :
Vous vous intéresserez plus particulièrement à déterminer
- le centre d’inertie de la roue.
- le moment d’inertie de la roue par rapport à son axe de rotation.
Démarche de l'ingénieur
Rôle de chacun des membres de l'équipe
Mission spécifique du groupe expérimentateur
Le groupe expérimentateur doit mettre en oeuvre les compétences suivantes :
Analyser les performances et les écarts
Proposer un modèle de connaissance et de comportement
Proposer une démarche de résolution
Mettre en oeuvre une démarche de résolution analytique
Mettre en oeuvre un système
Proposer et justifier un protocole expérimental
Mettre en oeuvre un protocole expérimental
Mission spécifique du groupe modélisateur
Le groupe modélisateur doit mettre en oeuvre les compétences suivantes :
 Mettre en oeuvre une démarche de résolution numérique
Mettre en oeuvre une démarche de résolution numériqueMission spécifique au groupe projet
Cela est l’occasion pour que le groupe expérimentateur et le groupe modélisateur confrontent leurs résultats et en tire les conclusions nécessaires sur la démarche de l’ingénieur.
Les groupes projet doivent mettre en oeuvre les compétences suivantes :
Organisation
Caractéristique d’inertie du solide étudié : Centre d'inertie
Nous vous mettons à disposition :
Nous ferons l'hypothèse que, dans toutes les pièces que nous étudierons, le champ de pesanteur est uniforme.
A partir de la définition du centre de gravite \(G\), nous savons que :
\( \int_{\mathbb{D}} \overrightarrow{GM} \wedge \overrightarrow{g} \cdot \mathrm{d}m = \overrightarrow{0} \)
Avec l'hypothèse formulée ci-dessus, on peut écrire
\( \int_{\mathbb{D}} \overrightarrow{GM} \cdot \mathrm{d}m \wedge \overrightarrow{g} = \overrightarrow{0} \)
\( \int_{\mathbb{D}} \overrightarrow{GM} \cdot \mathrm{d}m = \overrightarrow{0} \)
On rappelle la définition du centre d'inertie \( G \) :
\( \int_{\mathbb{D}} \overrightarrow{GM} \cdot \mathrm{d}m = \overrightarrow{0} \)
De ce fait, nous pourrons nous affirmer que le centre d'inertie et le centre de gravité sont confondus si le champ de pesanteur est uniforme dans la pièce.
Proposer un modèle simplifié permettant de donner la position du centre d’inertie.
A partir du modèle numérique sous SolidWorks mise à disposition,
- Ouvrir la pièce ou l'assemblage que vous étudiez.
- Dans le menu " Outils ", " Evaluer ", cliquer sur " Propriétés de masse "
- Cliquer sur le bouton " Options "
- Cocher " Notation scientifique "
- Décocher " Montrer le système de coordonnées de sortie dans le coin de la fenêtre "
- Cliquer le bouton " OK "
- Changer éventuellement " Indiquer les valeurs de coordonnées relatives à : "
- Cliquer par précaution sur le bouton " Recalculer "
- Exploiter les informations à votre disposition
Retrouver la position du centre d’inertie à l’aide de la maquette numérique de la pièce.
En demandant à votre professeur le matériel que vous souhaitez utiliser, réaliser toutes les expériences nécessaires permettant de déterminer la position du centre d’inertie
Vous prendrez soin d’identifier les capteurs utilisés lors de l’acquisition.
A partir des grandeurs physiques mesurées, déterminer la position du centre d’inertie.
Caractéristique d’inertie du solide étudié : Moment d'inertie selon l'axe de rotation
Nous vous mettons à disposition :
Proposer un modèle de géométrie simplifié permettant de donner une valeur approchée du moment d’inertie.
A partir du modèle numérique sous SolidWorks mise à disposition,
- Ouvrir la pièce ou l'assemblage que vous étudiez.
- Dans le menu " Outils ", " Evaluer ", cliquer sur " Propriétés de masse "
- Cliquer sur le bouton " Options "
- Cocher " Notation scientifique "
- Décocher " Montrer le système de coordonnées de sortie dans le coin de la fenêtre "
- Cliquer le bouton " OK "
- Changer éventuellement " Indiquer les valeurs de coordonnées relatives à : "
- Cliquer par précaution sur le bouton " Recalculer "
- Exploiter les informations à votre disposition pour répondre à la question suivante :
Retrouver la matrice d’inertie à l’aide de la maquette numérique de la pièce.
Y extraire de cette matrice le moment d’inertie que l'on cherche à connaître.
En demandant à votre professeur le matériel que vous souhaitez utiliser, réaliser toutes les expériences nécessaires permettant de déterminer une caractéristique temporelle dans le but de déterminer la valeur du moment d’inertie.
Vous prendrez soin d’identifier les capteurs utilisés lors de l’acquisition.
A partir des grandeurs physiques mesurées, déterminer la valeur du moment d’inertie
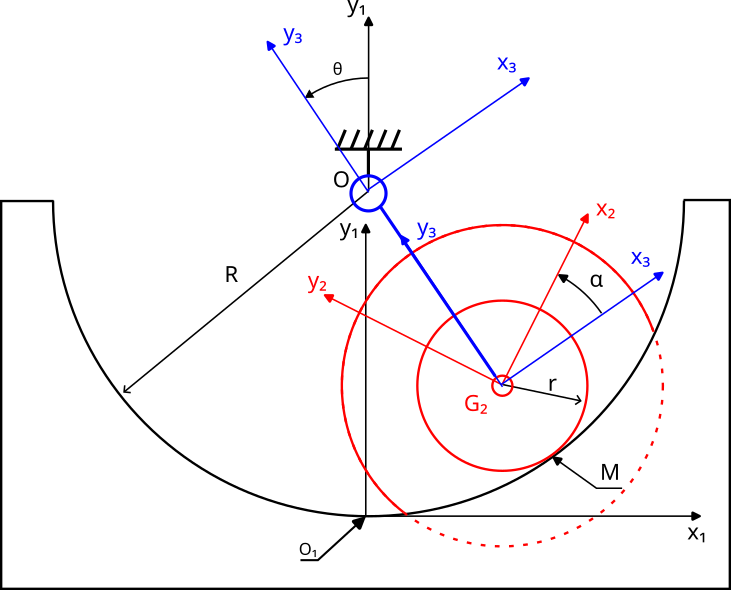
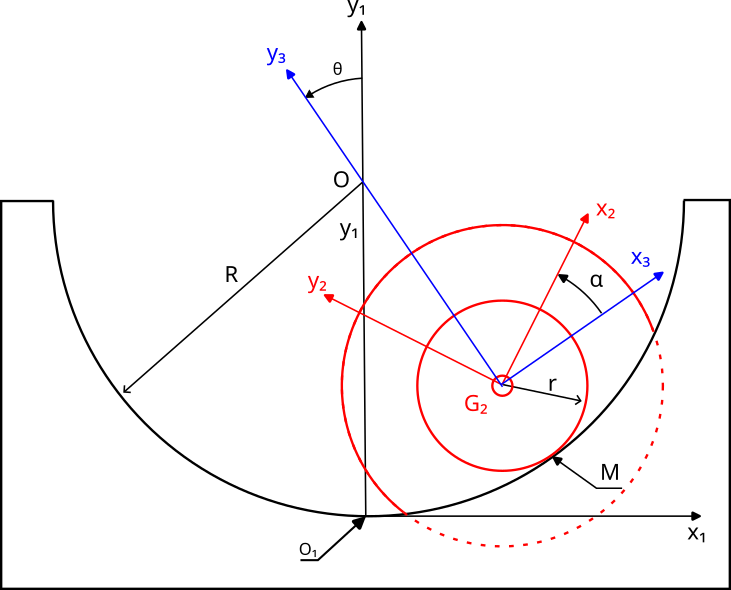
Nous vous proposons ce schéma cinématique paramétré afin que vous puissiez mener votre étude
Ce schéma sera plus approprié pour l'étude cinématique
Ce schéma sera plus approprié pour l'étude dynamique
Caractéristique du bâti \(S_1\)
- \(\overrightarrow{O_1O} = R \cdot \overrightarrow{y}_1\)
Caractéristique du solide \(S_2\)
- de masse \(m_2\)
- de centre de gravité \(G_2\)
- a un axe de révolution \((G_2,\overrightarrow{z}_{1,2,3})\)
- de matrice d'inertie \(I_2(G_2)=\begin{pmatrix} A_2 & 0 & 0 \\ 0 & A_2 & 0 \\ 0 & 0 & C_2 \end{pmatrix}_{B_2} \)
- \(\overrightarrow{MG} = r \cdot \overrightarrow{y}_3\)
Caractéristique du solide \(S_3\)
Ce solide fictif est mis dans le modèle afin de vous faciliter l'étude cinématique. De ce fait,
- Il est sans masse
- Il n'exerce pas d'efforts ou de moments sur les autres solides : \(\left\{T_{2\rightarrow 3} \right\}=\left\{0 \right\}\) et \(\left\{T_{1\rightarrow 3} \right\}=\left\{0 \right\}\)
Modèle
- Le solide fictif \(S_3\) et le bâti \(S_1\) sont en liaison pivot d'axe \( (O,\overrightarrow{z}_{1,2,3}) \) : \(\theta_{31}=(\overrightarrow{x}_1,\overrightarrow{x}_3)=(\overrightarrow{y}_1,\overrightarrow{y}_3)\)
- Le solide fictif \(S_3\) et le solide \(S_2\) sont en liaison pivot d'axe \( (G_2,\overrightarrow{z}_{1,2,3}) \) : \(\alpha_{23}=(\overrightarrow{x}_3,\overrightarrow{x}_2)=(\overrightarrow{y}_3,\overrightarrow{y}_2)\)
- Le solide \(S_2\) et le solide \(S_1\) sont en contact cylindre plan en \(M\) et de normale \(\overrightarrow{z}_{1,2,3} \).
- De plus, il est impératif qu'il y ait un roulement sans glissement en \(M\) entre \(S_2\) et \(S_1\). Si expérimentalement, on constate un glissement, il faudra trouver une solution pour qu'il y ait adhérence...
- Je vous rappelle si on a une condition de roulement sans glissement, cela implique forcément qu'il y a du frottement au niveau du contact.