Séquence 4 : Portail deux vantaux
Travail préparatoire
Pour répondre aux questions posées ci-dessous, nous vous invitons à faire une recherche sur internet. Gardez un esprit critique sur ce que vous pouvez lire.
Comment localiser un centre d'inertie ?
Nous ferons l'hypothèse que, dans toutes les pièces que nous étudierons, le champ de pesanteur est uniforme.
A partir de la définition du centre de gravite \(G\), nous savons que :
\( \int_{\mathbb{D}} \overrightarrow{GM} \wedge \overrightarrow{g} \cdot \mathrm{d}m = \overrightarrow{0} \)
Avec l'hypothèse formulée ci-dessus, on peut écrire
\( \int_{\mathbb{D}} \overrightarrow{GM} \cdot \mathrm{d}m \wedge \overrightarrow{g} = \overrightarrow{0} \)
\( \int_{\mathbb{D}} \overrightarrow{GM} \cdot \mathrm{d}m = \overrightarrow{0} \)
On rappelle la définition du centre d'inertie \( G \) :
\( \int_{\mathbb{D}} \overrightarrow{GM} \cdot \mathrm{d}m = \overrightarrow{0} \)
De ce fait, nous pourrons nous affirmer que le centre d'inertie et le centre de gravité sont confondus si le champ de pesanteur est uniforme dans la pièce.
Comment mesurer un moment d'inertie ?
Comment peut on mesurer un moment d'inertie d'un solide de révolution.
Préciser sur chaque expérience proposée si cela nécessite une condition sur le centre d'inertie, les autres moments d'inertie ou les produits d'inertie.
Comment peut on mesurer un moment d'inertie d'un solide n'ayant pas un solide de révolution.
Préciser sur chaque expérience proposée si cela nécessite une condition sur le centre d'inertie, les autres moments d'inertie et les produits d'inertie.
Environnement nécessaire pour le déroulement de la séquence
Matériel nécéssaire pour le système
- portail à deux vantaux :
- équipé du boîtier d'acquisition " Vernier " associé à un ordinateur pourvu du logiciel " Logger Pro " installé et correctement configuré avec le fichier " demarrage.xmbl "
- configuré tel que :
- moteur du grand vantail positionné à 260 millimètre (index rouge à 260 millimètre) ;
- bielle du grand vantail positionnée à 375 millimètre (index rouge à 475 millimètre) ;
- moteur du petit vantail positionné à 100 millimètre (index rouge à 100 millimètre) ;
- bielle du petit vantail positionnée à 235 millimètre (index rouge à 335 millimètre) ;
- le frein du grand vantail est complètement desserré ;
- tous les interrupteurs du boîtier de commande en position " TCA ", " IBL " et " FCH ".
- trois temporisateurs réglables permettent de modifier les caractéristiques du cycle d'ouverture-fermeture. Les potentiomètres " TL ", " TCA " et " DELAI M2 " permettent d'ajuster les valeurs suivantes :
- temps de fonctionnement des moteurs en ouverture ou fermeture : potentiomètre " TL " ;
- durée d'arrêt des moteurs dans la position vantaux ouverts : potentiomètre " TCA " ;
- décalage temporel entre les débuts de fermeture des deux vantaux : potentiomètre " DELAI M2 ".
- temps de fonctionnement des moteurs = durée de l'opération d'ouverture du grand vantail + 2 secondes (justification par la suite) ;
- maintien du portail ouvert durant 5 secondes ;
- décalage minimum entre les débuts de fermeture des deux vantaux afin que les deux vantaux se ferment en même temps.
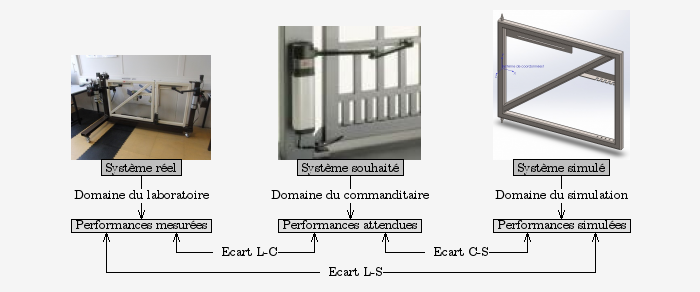
Présentation du système
Domaine du commanditaire
Le système étudié est l'ouvre portail de type E5 commercialisé par la société BFT.
De faible encombrement, ce système permet l'ouverture automatique et télécommandée de portails battants. Il est destiné à un usage résidentiel.

|
Le groupe BFT, basé en Italie, au travers de sa filiale Automatismes BFT France propose une gamme complète d'automatismes électromécaniques et oléo-dynamiques pour motoriser portails, portes de garage, systèmes de parking et contrôle d'accès. Exclusivement professionnelle, la marque BFT s'étend sur les marchés résidentiel, collectif et industriel. Le système retenu pour notre étude est une motorisation pour portails battants, longueur du vantail jusqu'à 1,80 m, poids jusqu'à 200 kg, à usage résidentiel. L'ensemble est vendu en kit pré câblé et comporte :
|
Le système d'ouverture semi automatise DOMOTICC est représenté sur la figure ci-dessous :
|

Domaine du laboratoire

Le matériel est composé principalement d'un châssis métallique supportant le portail, d'une centrale de commande avec émetteur H.F., de deux moto-réducteurs avec limiteur de couple et tringlerie d'ouverture de portail et d'un ensemble de capteurs spécifiques associés à une carte de traitement.
Outre son bâti mécano-soudé, ce système automatisé est constitué de trois sous-ensembles principaux :
- Le grand vantail instrumenté comprenant :
- 4 capteurs :
- capteur n° 1 : un potentiomètre de précision qui permet de mesurer la position angulaire du bras du motoréducteur ;
- capteur n° 2 : un potentiomètre de précision qui permet de mesurer la position angulaire du grand vantail ;
- capteur n° 3 : une jauge de contrainte qui permet de mesurer le couple fourni par le motoréducteur ;
- capteur n° 4 : une jauge de contrainte qui permet de mesurer le couple sur le vantail (voir fonction suivante) ;
- un frein : ce frein permet de simuler l'effet du vent sur le vantail ;
- un support permettant de placer des masses de 10 kg (charge maxi 50 kg) pour modifier l’inertie du vantail ;
- une motorisation par un moto-réducteur à bras avec limiteur de couple à friction (B. F. T. - Réf.E5).
- Le petit vantail comprenant :
- une électro-serrure de verrouillage du portail ;
- une motorisation par un moto-réducteur à bras avec limiteur de couple à friction (B. F. T. - Réf. E5).
- Le coffret de contrôle / commande
Problématique
Déterminer des éléments d’inertie utiles à l’étude du comportement dynamique du système :
Vous vous intéresserez plus particulièrement à déterminer
- le centre d’inertie du grand vantail.
- le moment d’inertie du grand vantail par rapport à son axe de rotation.
Démarche de l'ingénieur
Rôle de chacun des membres de l'équipe
Mission spécifique du groupe expérimentateur
Le groupe expérimentateur doit mettre en oeuvre les compétences suivantes :
Analyser les performances et les écarts
Proposer un modèle de connaissance et de comportement
Proposer une démarche de résolution
Mettre en oeuvre une démarche de résolution analytique
Mettre en oeuvre un système
Proposer et justifier un protocole expérimental
Mettre en oeuvre un protocole expérimental
Mission spécifique du groupe modélisateur
Le groupe modélisateur doit mettre en oeuvre les compétences suivantes :
 Mettre en oeuvre une démarche de résolution numérique
Mettre en oeuvre une démarche de résolution numériqueMission spécifique au groupe projet
Cela est l’occasion pour que le groupe expérimentateur et le groupe modélisateur confrontent leurs résultats et en tire les conclusions nécessaires sur la démarche de l’ingénieur.
Les groupes projet doivent mettre en oeuvre les compétences suivantes :
Organisation
Caractéristique d’inertie du solide étudié : Centre d'inertie
Nous vous mettons à disposition :
Nous ferons l'hypothèse que, dans toutes les pièces que nous étudierons, le champ de pesanteur est uniforme.
A partir de la définition du centre de gravite \(G\), nous savons que :
\( \int_{\mathbb{D}} \overrightarrow{GM} \wedge \overrightarrow{g} \cdot \mathrm{d}m = \overrightarrow{0} \)
Avec l'hypothèse formulée ci-dessus, on peut écrire
\( \int_{\mathbb{D}} \overrightarrow{GM} \cdot \mathrm{d}m \wedge \overrightarrow{g} = \overrightarrow{0} \)
\( \int_{\mathbb{D}} \overrightarrow{GM} \cdot \mathrm{d}m = \overrightarrow{0} \)
On rappelle la définition du centre d'inertie \( G \) :
\( \int_{\mathbb{D}} \overrightarrow{GM} \cdot \mathrm{d}m = \overrightarrow{0} \)
De ce fait, nous pourrons nous affirmer que le centre d'inertie et le centre de gravité sont confondus si le champ de pesanteur est uniforme dans la pièce.
Proposer un modèle simplifié permettant de donner la position du centre d’inertie.
A partir du modèle numérique sous SolidWorks mise à disposition,
- Ouvrir la pièce ou l'assemblage que vous étudiez.
- Dans le menu " Outils ", " Evaluer ", cliquer sur " Propriétés de masse "
- Cliquer sur le bouton " Options "
- Cocher " Notation scientifique "
- Décocher " Montrer le système de coordonnées de sortie dans le coin de la fenêtre "
- Cliquer le bouton " OK "
- Changer éventuellement " Indiquer les valeurs de coordonnées relatives à : "
- Cliquer par précaution sur le bouton " Recalculer "
- Exploiter les informations à votre disposition
Retrouver la position du centre d’inertie à l’aide de la maquette numérique de la pièce.
En demandant à votre professeur le matériel que vous souhaitez utiliser, réaliser toutes les expériences nécessaires permettant de déterminer la position du centre d’inertie
Vous prendrez soin d’identifier les capteurs utilisés lors de l’acquisition.
A partir des grandeurs physiques mesurées, déterminer la position du centre d’inertie.
Caractéristique d’inertie du solide étudié : Moment d'inertie selon l'axe de rotation
Nous vous mettons à disposition :
Proposer un modèle de géométrie simplifié permettant de donner une valeur approchée du moment d’inertie.
A partir du modèle numérique sous SolidWorks mise à disposition,
- Ouvrir la pièce ou l'assemblage que vous étudiez.
- Dans le menu " Outils ", " Evaluer ", cliquer sur " Propriétés de masse "
- Cliquer sur le bouton " Options "
- Cocher " Notation scientifique "
- Décocher " Montrer le système de coordonnées de sortie dans le coin de la fenêtre "
- Cliquer le bouton " OK "
- Changer éventuellement " Indiquer les valeurs de coordonnées relatives à : "
- Cliquer par précaution sur le bouton " Recalculer "
- Exploiter les informations à votre disposition pour répondre à la question suivante :
Retrouver la matrice d’inertie à l’aide de la maquette numérique de la pièce.
Y extraire de cette matrice le moment d’inertie que l'on cherche à connaître.
En demandant à votre professeur le matériel que vous souhaitez utiliser, réaliser toutes les expériences nécessaires permettant de déterminer une caractéristique temporelle dans le but de déterminer la valeur du moment d’inertie.
Vous prendrez soin d’identifier les capteurs utilisés lors de l’acquisition.
A partir des grandeurs physiques mesurées, déterminer la valeur du moment d’inertie
Nous vous proposons Ce schéma cinématique paramétré afin que vous puissiez mener votre étude
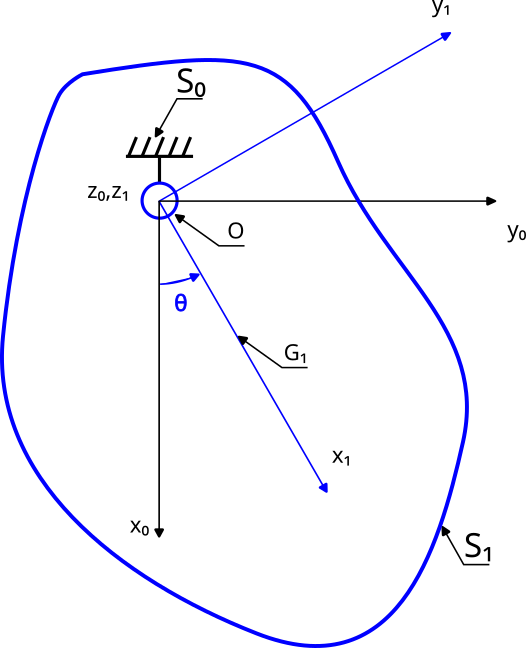
Caractéristique du solide \(S_1\)
- de masse \(m_1\)
- de centre de gravité \(G_1\)
- de matrice d'inertie \(I_1(O) = \begin{pmatrix} A_1 & -F_1 & -E_1 \\ -F_1 & B_1 & -D_1 \\ -E_1 & -D_1 & C_1 \end{pmatrix}_{(\overrightarrow{x}_1,\overrightarrow{y}_1,\overrightarrow{z}_{0,1})} \)
- \(\overrightarrow{OG_1}=L_1 \cdot \overrightarrow{x}_1\)
Modèle
- en liaison pivot d'axe \( (O,\overrightarrow{z}_{0,1}) \) avec le bâti \(0\) : \(\theta_{10}=(\overrightarrow{x}_0,\overrightarrow{x}_1)=(\overrightarrow{y}_0,\overrightarrow{y}_1)\)