Séquence 4 : Banc d'équilibrage
Travail préparatoire
Pour répondre aux questions posées ci-dessous, nous vous invitons à faire une recherche sur internet. Gardez un esprit critique sur ce que vous pouvez lire.
Comment localiser un centre d'inertie ?
Nous ferons l'hypothèse que, dans toutes les pièces que nous étudierons, le champ de pesanteur est uniforme.
A partir de la définition du centre de gravite \(G\), nous savons que :
\( \int_{\mathbb{D}} \overrightarrow{GM} \wedge \overrightarrow{g} \cdot \mathrm{d}m = \overrightarrow{0} \)
Avec l'hypothèse formulée ci-dessus, on peut écrire
\( \int_{\mathbb{D}} \overrightarrow{GM} \cdot \mathrm{d}m \wedge \overrightarrow{g} = \overrightarrow{0} \)
\( \int_{\mathbb{D}} \overrightarrow{GM} \cdot \mathrm{d}m = \overrightarrow{0} \)
On rappelle la définition du centre d'inertie \( G \) :
\( \int_{\mathbb{D}} \overrightarrow{GM} \cdot \mathrm{d}m = \overrightarrow{0} \)
De ce fait, nous pourrons nous affirmer que le centre d'inertie et le centre de gravité sont confondus si le champ de pesanteur est uniforme dans la pièce.
Comment mesurer un moment d'inertie ?
Comment peut on mesurer un moment d'inertie d'un solide de révolution.
Préciser sur chaque expérience proposée si cela nécessite une condition sur le centre d'inertie, les autres moments d'inertie ou les produits d'inertie.
Comment peut on mesurer un moment d'inertie d'un solide n'ayant pas un solide de révolution.
Préciser sur chaque expérience proposée si cela nécessite une condition sur le centre d'inertie, les autres moments d'inertie et les produits d'inertie.
Environnement nécessaire pour le déroulement de la séquence
Matériel nécéssaire pour le système
- Deux bancs d'équilibrage DeltaLab :
- l'un (celui de droite) équipé d'un boîtier d'acquisition " DeltaLab " associé à un ordinateur pourvu des logiciels " Vibraleq " et " Matlab " installés.
- l'autre (celui de gauche) ayant le rotor démonté permettant au groupe expérimentateur de réaliser certaines expériences.
Présentation du système
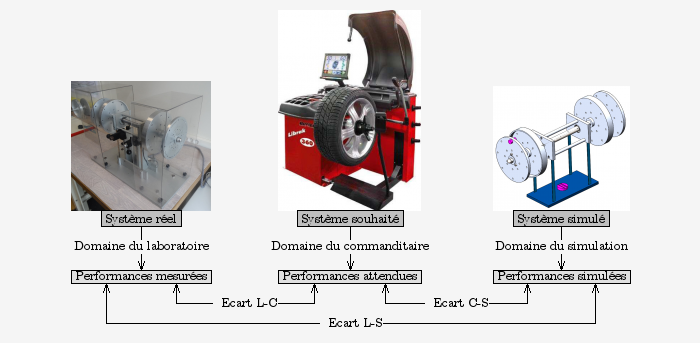
Domaine du commanditaire
|
Lorsque un solide est entraîné en rotation autour d'un axe fixe, et qu'il possède une mauvaise répartition de matière autour de l'axe de rotation, l'application du Principe Fondamental de la Dynamique permet de montrer, en autres, que des forces centrifuges tournantes, s'exercent sur ce solide. Dans la plupart des applications où des solides sont entraînés en rotation (comme pour un arbre de compresseur de réacteur), ces forces tournantes sont indésirables car elles provoquent des vibrations nuisibles ; celles-ci peuvent engendrer une détérioration rapide des paliers (fatigue du matériau et usure), ainsi qu'une gène pour l'utilisateur du matériel. |
|

Pour supprimer ces vibrations dues aux masses mal réparties, on réalise un équilibrage statique et dynamique. Cet équilibrage est d'autant plus nécessaire que la vitesse de rotation est grande.
Domaine du laboratoire
La machine représentée ci-dessous est utilisée en travaux pratiques pour mettre en évidence les phénomènes dus au déséquilibre des masses tournantes.
|
|
Le mécanisme réel est constitué :
Le rotor composé d'un arbre, de quatre plateaux et de masselottes additionnelles, est guidé en rotation par deux roulements dans le palier mobile. Les quatre lames qui sont encastrées dans le bâti et le palier mobile, permettent, du fait de leur élasticité, certains types de mouvements entre le palier et le bâti. La liaison élastique ainsi réalisée permet une translation et une rotation d'amplitude limitée entre ces deux pièces. |
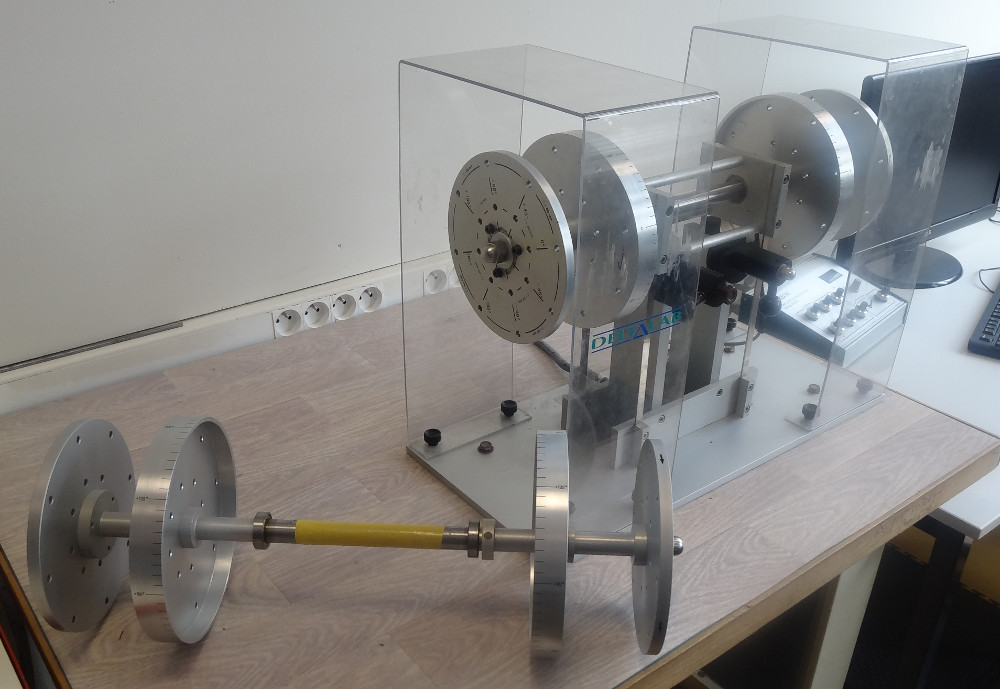
On peut ajouter des masselottes sur les plateaux pour provoquer un déséquilibre du rotor et en visualiser ou mesurer les incidences. Le rééquilibrage sera obtenu à l'aide d'autres masselottes.
Au cours de cette activité, on se propose dans un premier temps d'étudier l'effet d'un déséquilibrage sur le mécanisme puis de déterminer les opérateurs d'inertie qui seront nécessaires à la réalisation d'une démarche d'équilibrage.
Pour ce faire, vous disposez d'une maquette expérimentale complète et instrumentée reliée à l'ordinateur afin de réaliser les acquisitions sur le mécanisme. Vous disposez aussi d'un second système dont le rotor a été démonté afin de réaliser des expériences complémentaires. On supposera que la géométrie et la masse des deux systèmes est rigoureusement identique.
Problématique
Déterminer des éléments d’inertie utiles à l’étude du comportement dynamique du système :
Vous vous intéresserez plus particulièrement à déterminer
- le centre d’inertie du rotor du banc d’équilibrage.
- le moment d’inertie du rotor du banc d’équilibrage selon son axe de rotation.
Pour aller plus loin, nous pourrons étudier également le rotor du banc d’équilibrage avec une masselotte additionnelle.
Démarche de l'ingénieur
Rôle de chacun des membres de l'équipe
Mission spécifique du groupe expérimentateur
Le groupe expérimentateur doit mettre en oeuvre les compétences suivantes :
Analyser les performances et les écarts
Proposer un modèle de connaissance et de comportement
Proposer une démarche de résolution
Mettre en oeuvre une démarche de résolution analytique
Mettre en oeuvre un système
Proposer et justifier un protocole expérimental
Mettre en oeuvre un protocole expérimental
Mission spécifique du groupe modélisateur
Le groupe modélisateur doit mettre en oeuvre les compétences suivantes :
 Mettre en oeuvre une démarche de résolution numérique
Mettre en oeuvre une démarche de résolution numériqueMission spécifique au groupe projet
Cela est l’occasion pour que le groupe expérimentateur et le groupe modélisateur confrontent leurs résultats et en tire les conclusions nécessaires sur la démarche de l’ingénieur.
Les groupes projet doivent mettre en oeuvre les compétences suivantes :
Organisation
Caractéristique d’inertie du solide étudié : Centre d'inertie
Nous vous mettons à disposition :
Nous ferons l'hypothèse que, dans toutes les pièces que nous étudierons, le champ de pesanteur est uniforme.
A partir de la définition du centre de gravite \(G\), nous savons que :
\( \int_{\mathbb{D}} \overrightarrow{GM} \wedge \overrightarrow{g} \cdot \mathrm{d}m = \overrightarrow{0} \)
Avec l'hypothèse formulée ci-dessus, on peut écrire
\( \int_{\mathbb{D}} \overrightarrow{GM} \cdot \mathrm{d}m \wedge \overrightarrow{g} = \overrightarrow{0} \)
\( \int_{\mathbb{D}} \overrightarrow{GM} \cdot \mathrm{d}m = \overrightarrow{0} \)
On rappelle la définition du centre d'inertie \( G \) :
\( \int_{\mathbb{D}} \overrightarrow{GM} \cdot \mathrm{d}m = \overrightarrow{0} \)
De ce fait, nous pourrons nous affirmer que le centre d'inertie et le centre de gravité sont confondus si le champ de pesanteur est uniforme dans la pièce.
Proposer un modèle simplifié permettant de donner la position du centre d’inertie.
A partir du modèle numérique sous SolidWorks mise à disposition,
- Ouvrir la pièce ou l'assemblage que vous étudiez.
- Dans le menu " Outils ", " Evaluer ", cliquer sur " Propriétés de masse "
- Cliquer sur le bouton " Options "
- Cocher " Notation scientifique "
- Décocher " Montrer le système de coordonnées de sortie dans le coin de la fenêtre "
- Cliquer le bouton " OK "
- Changer éventuellement " Indiquer les valeurs de coordonnées relatives à : "
- Cliquer par précaution sur le bouton " Recalculer "
- Exploiter les informations à votre disposition
Retrouver la position du centre d’inertie à l’aide de la maquette numérique de la pièce.
En demandant à votre professeur le matériel que vous souhaitez utiliser, réaliser toutes les expériences nécessaires permettant de déterminer la position du centre d’inertie
Vous prendrez soin d’identifier les capteurs utilisés lors de l’acquisition.
A partir des grandeurs physiques mesurées, déterminer la position du centre d’inertie.
Caractéristique d’inertie du solide étudié : Moment d'inertie selon l'axe de rotation
Nous vous mettons à disposition :
Proposer un modèle de géométrie simplifié permettant de donner une valeur approchée du moment d’inertie.
A partir du modèle numérique sous SolidWorks mise à disposition,
- Ouvrir la pièce ou l'assemblage que vous étudiez.
- Dans le menu " Outils ", " Evaluer ", cliquer sur " Propriétés de masse "
- Cliquer sur le bouton " Options "
- Cocher " Notation scientifique "
- Décocher " Montrer le système de coordonnées de sortie dans le coin de la fenêtre "
- Cliquer le bouton " OK "
- Changer éventuellement " Indiquer les valeurs de coordonnées relatives à : "
- Cliquer par précaution sur le bouton " Recalculer "
- Exploiter les informations à votre disposition pour répondre à la question suivante :
Retrouver la matrice d’inertie à l’aide de la maquette numérique de la pièce.
Y extraire de cette matrice le moment d’inertie que l'on cherche à connaître.
En demandant à votre professeur le matériel que vous souhaitez utiliser, réaliser toutes les expériences nécessaires permettant de déterminer une caractéristique temporelle dans le but de déterminer la valeur du moment d’inertie.
Vous prendrez soin d’identifier les capteurs utilisés lors de l’acquisition.
Pour cela, voici une expérience qui peut être faite pour mesurer le moment d'inertie. Un pointage vidéo a été faite à l'aide de tracker pour suivre une forme facilement repérable :
Le fichier inertie.csv donne la position du centre de la forme suivie au cours du temps par rapport au repère rose.
Le fichier traitement.ipynb quand à lui vous permettra de lire ce fichier inertie.csv et de commencer un traitement des données pour mesurer de manière précise la période d'oscillation. Vous aurez besoin également de cette image.
Pour déterminer la période d'oscillation, il faudra suivre les indications dans le fichier jupyter.
A partir des grandeurs physiques mesurées, déterminer la valeur du moment d’inertie
Nous vous proposons ce schéma cinématique paramétré afin que vous puissiez mener votre étude
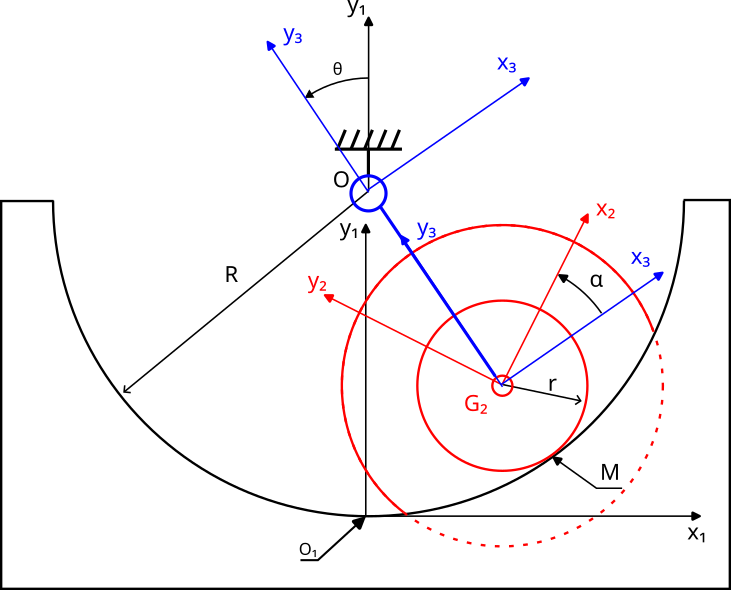
Ce schéma sera plus approprié pour l'étude cinématique
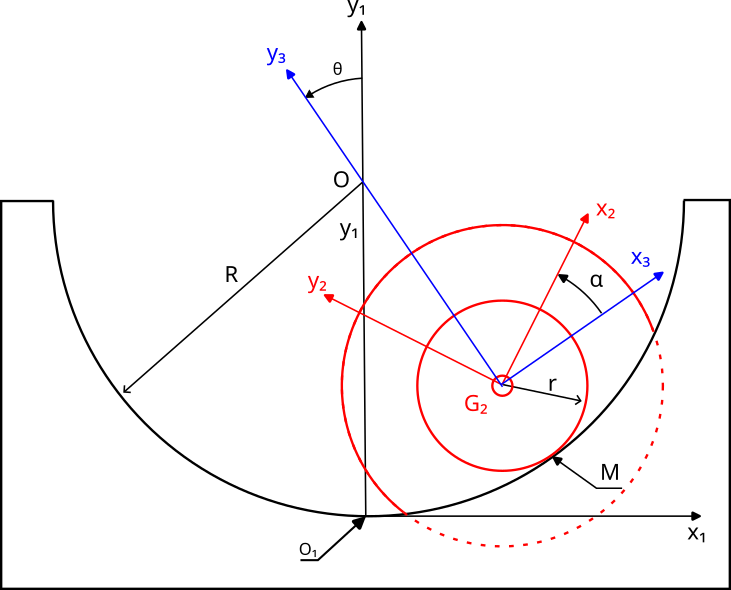
Ce schéma sera plus approprié pour l'étude dynamique
Caractéristique du bâti \(S_1\)
- \(\overrightarrow{O_1O} = R \cdot \overrightarrow{y}_1\)
Caractéristique du solide \(S_2\)
- de masse \(m_2\)
- de centre de gravité \(G_2\)
- a un axe de révolution \((G_2,\overrightarrow{z}_{1,2,3})\)
- de matrice d'inertie \(I_2(G_2)=\begin{pmatrix} A_2 & 0 & 0 \\ 0 & A_2 & 0 \\ 0 & 0 & C_2 \end{pmatrix}_{B_2} \)
- \(\overrightarrow{MG} = r \cdot \overrightarrow{y}_3\)
Caractéristique du solide \(S_3\)
Ce solide fictif est mis dans le modèle afin de vous faciliter l'étude cinématique. De ce fait,
- Il est sans masse
- Il n'exerce pas d'efforts ou de moments sur les autres solides : \(\left\{T_{2\rightarrow 3} \right\}=\left\{0 \right\}\) et \(\left\{T_{1\rightarrow 3} \right\}=\left\{0 \right\}\)
Modèle
- Le solide fictif \(S_3\) et le bâti \(S_1\) sont en liaison pivot d'axe \( (O,\overrightarrow{z}_{1,2,3}) \) : \(\theta_{31}=(\overrightarrow{x}_1,\overrightarrow{x}_3)=(\overrightarrow{y}_1,\overrightarrow{y}_3)\)
- Le solide fictif \(S_3\) et le solide \(S_2\) sont en liaison pivot d'axe \( (G_2,\overrightarrow{z}_{1,2,3}) \) : \(\alpha_{23}=(\overrightarrow{x}_3,\overrightarrow{x}_2)=(\overrightarrow{y}_3,\overrightarrow{y}_2)\)
- Le solide \(S_2\) et le solide \(S_1\) sont en contact cylindre plan en \(M\) et de normale \(\overrightarrow{z}_{1,2,3} \).
- De plus, il est impératif qu'il y ait un roulement sans glissement en \(M\) entre \(S_2\) et \(S_1\). Si expérimentalement, on constate un glissement, il faudra trouver une solution pour qu'il y ait adhérence...
- Je vous rappelle si on a une condition de roulement sans glissement, cela implique forcément qu'il y a du frottement au niveau du contact.
Déterminer, si besoin, tous les paramètres cinématiques en fonction de l'angle d'oscillation \(\theta\).
Proposer une démarche permettant la détermination de la loi de mouvement.
Déterminer la loi de mouvement
Donner l'expression du moment d'inertie en fonction de la période d'oscillation