Séquence 4 : Banc d'équilibrage
Caractéristique d’inertie du solide étudié : Moment d'inertie selon l'axe de rotation
Nous vous mettons à disposition :
Proposer un modèle de géométrie simplifié permettant de donner une valeur approchée du moment d’inertie.
A partir du modèle numérique sous SolidWorks mise à disposition,
- Ouvrir la pièce ou l'assemblage que vous étudiez.
- Dans le menu " Outils ", " Evaluer ", cliquer sur " Propriétés de masse "
- Cliquer sur le bouton " Options "
- Cocher " Notation scientifique "
- Décocher " Montrer le système de coordonnées de sortie dans le coin de la fenêtre "
- Cliquer le bouton " OK "
- Changer éventuellement " Indiquer les valeurs de coordonnées relatives à : "
- Cliquer par précaution sur le bouton " Recalculer "
- Exploiter les informations à votre disposition pour répondre à la question suivante :
Retrouver la matrice d’inertie à l’aide de la maquette numérique de la pièce.
Y extraire de cette matrice le moment d’inertie que l'on cherche à connaître.
En demandant à votre professeur le matériel que vous souhaitez utiliser, réaliser toutes les expériences nécessaires permettant de déterminer une caractéristique temporelle dans le but de déterminer la valeur du moment d’inertie.
Vous prendrez soin d’identifier les capteurs utilisés lors de l’acquisition.
A partir des grandeurs physiques mesurées, déterminer la valeur du moment d’inertie
Nous vous proposons ce schéma cinématique paramétré afin que vous puissiez mener votre étude
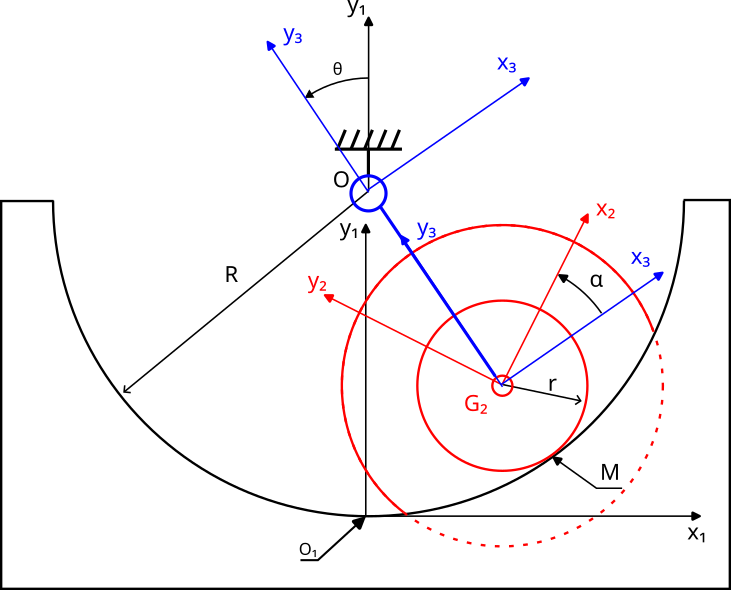
Ce schéma sera plus approprié pour l'étude cinématique
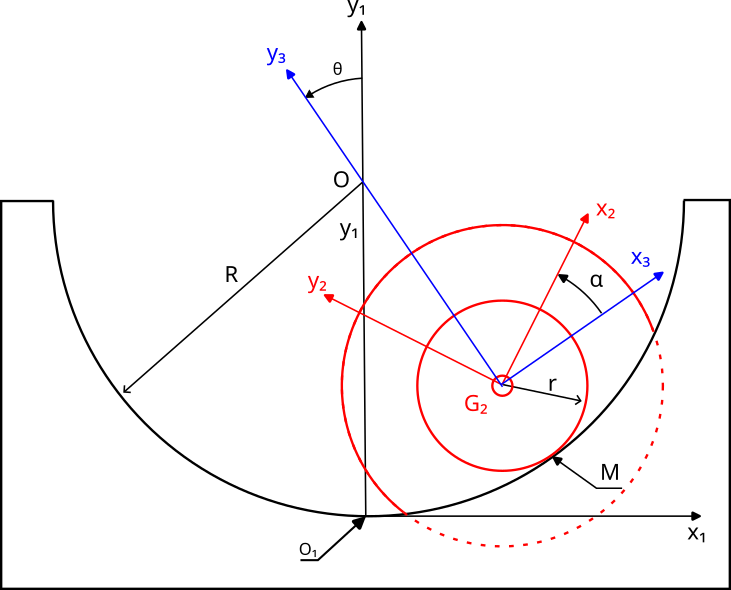
Ce schéma sera plus approprié pour l'étude dynamique
Caractéristique du bâti \(S_1\)
- \(\overrightarrow{O_1O} = R \cdot \overrightarrow{y}_1\)
Caractéristique du solide \(S_2\)
- de masse \(m_2\)
- de centre de gravité \(G_2\)
- a un axe de révolution \((G_2,\overrightarrow{z}_{1,2,3})\)
- de matrice d'inertie \(I_2(G_2)=\begin{pmatrix} A_2 & 0 & 0 \\ 0 & A_2 & 0 \\ 0 & 0 & C_2 \end{pmatrix}_{B_2} \)
- \(\overrightarrow{MG} = r \cdot \overrightarrow{y}_3\)
Caractéristique du solide \(S_3\)
Ce solide fictif est mis dans le modèle afin de vous faciliter l'étude cinématique. De ce fait,
- Il est sans masse
- Il n'exerce pas d'efforts ou de moments sur les autres solides : \(\left\{T_{2\rightarrow 3} \right\}=\left\{0 \right\}\) et \(\left\{T_{1\rightarrow 3} \right\}=\left\{0 \right\}\)
Modèle
- Le solide fictif \(S_3\) et le bâti \(S_1\) sont en liaison pivot d'axe \( (O,\overrightarrow{z}_{1,2,3}) \) : \(\theta_{31}=(\overrightarrow{x}_1,\overrightarrow{x}_3)=(\overrightarrow{y}_1,\overrightarrow{y}_3)\)
- Le solide fictif \(S_3\) et le solide \(S_2\) sont en liaison pivot d'axe \( (G_2,\overrightarrow{z}_{1,2,3}) \) : \(\alpha_{23}=(\overrightarrow{x}_3,\overrightarrow{x}_2)=(\overrightarrow{y}_3,\overrightarrow{y}_2)\)
- Le solide \(S_2\) et le solide \(S_1\) sont en contact cylindre plan en \(M\) et de normale \(\overrightarrow{z}_{1,2,3} \).
- De plus, il est impératif qu'il y ait un roulement sans glissement en \(M\) entre \(S_2\) et \(S_1\). Si expérimentalement, on constate un glissement, il faudra trouver une solution pour qu'il y ait adhérence...
- Je vous rappelle si on a une condition de roulement sans glissement, cela implique forcément qu'il y a du frottement au niveau du contact.