Séquence 9 : Control'X
Travail préparatoire
Il n'y aura pas de travail préparatoire pour cette séquence.
Environnement nécessaire pour le déroulement de la séquence
Présentation du système
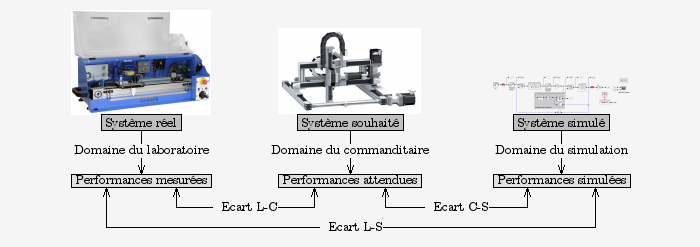
Domaine du commanditaire
|
Le système industriel dont est extrait Control'X est un robot portique 3 axes Lexium Max R du constructeur Schneider Electric. Ce robot portique permet d'apporter une solution fiable pour la manipulation de charges sur de longues distances : selon le modèle, des charges jusqu'à 50 kg peuvent être déplacées jusqu'à 5000 mm en \( X \), 1500 mm en \( Y \) et 1200 mm en \( Z \). L'entraînement de chaque axe est assuré par courroie crantée. Les guidages des chariots se font au choix par galets ou billes à recirculation. Ces robots portiques, commercialisés préassemblés, offrent différentes options de configuration pour chaque axe dont la longueur, le choix entre différentes tailles et types de profilés, le choix entre différents types de guidages ... |

|
L'application choisie pour contextualiser Control'X et celle du pick and place dans le domaine du placement de composants électroniques. Il s'agit d'un processus de précision consistant à positionner des composants électroniques sur des circuits imprimés. Le cœur de la machine est un portique 3 axes avec moteurs et servovariateurs pour obtenir des mouvements hautement dynamiques et une précision maximale.
Vous pouvez en voir différentes utilisations :
The New Pick and Place Machine
DIY Pick and Place speed update
Disc Tracking Machine - Motion control made by Schneider Electric
Xylophon machine - Motion control made by Schneider Electric
Domaine du laboratoire
|
Dans ce contexte d'utilisation, la particularité mécanique de Control'X tient au fait que les efforts extérieurs exercés sur l'axe sont nuls : le moteur sert uniquement à vaincre les efforts inertiels et les résistances passives internes au mécanisme.
Le moteur est souvent en prise directe avec la poulie motrice ou, s'il y a un réducteur, le rapport de réduction est généralement faible. L'axe linéaire commercialisé par DMS est une version didactique de l'axe industriel commercialisé par l'industriel Schneider. Il est en tout point identique à celui utilisé dans l'industrie en ce qui concerne sa partie mécanique : réducteur, poulies-courroie, chariot, guidages. |

|
Schneider, ne commercialise plus de moteur à courant continu à balais mais seulement des moteurs à courant continu sans balais. Ces moteurs brushless sont dans l'industrie en train de supplanter les moteurs à balais. Ils sont pilotés par des variateurs de vitesse spécifiques (série Lexium chez Schneider). Dans ces technologies brushless, le couple {variateur + moteur} n'est guère dissociable. Pour des questions de performance, chaque composant est en effet conçu de façon interdépendante.
Problématique
Exigence fonctionnelle : Réaliser un asservissement en position
| Critère | Niveaux | Flexibilité | |
|---|---|---|---|
| Stabilité | Stable | - | Nulle |
| Robustesse | Marge de phase | \( M_{\varphi} = 45° \) | Faible |
| Précision | Erreur en régime permanent vis-à-vis d'une entrée en échelon | Nulle | Nulle |
| Erreur en régime permanent vis-à-vis d'une perturbation en échelon | Nulle | Nulle | |
| Rapidité | Temps de réponse à 5 % | Le plus rapide possible | Forte |
Démarche de l'ingénieur
Rôle de chacun des membres de l'équipe
Mission spécifique du groupe expérimentateur
Le groupe expérimentateur doit mettre en oeuvre les compétences suivantes :
Mission spécifique du groupe modélisateur
Le groupe modélisateur doit mettre en oeuvre les compétences suivantes :
Mission spécifique au groupe projet
Cela est l’occasion pour que le groupe expérimentateur et le groupe modélisateur confrontent leurs résultats et en tire les conclusions nécessaires sur la démarche de l’ingénieur.
Les groupes projet doivent mettre en oeuvre les compétences suivantes :
Organisation
Modélisation globale d'un système asservi
Nous vous mettons à disposition pour toute cette séquence :
Structure d'une partie de la boucle ouverte sur la chaîne d'action
A votre convenance, établir le schéma-bloc
- sous « Scilab / Xcos » à partir du fichier « scilabXcosBO.zcos ».
ou bien
- sous « Matlab /Simulink » à partir du fichier « matlabSimulinkBO.slx ». Nous vous mettons également à disposition cette aide pour Simulink.
L'entrée considérée sera la commande, c'est-à-dire, la tension aux bornes du moteur.
La sortie sera la grandeur physique à asservir, c'est-à-dire, la position.
Cependant la grandeur physique visualisée dans le modèle pourra être celle qui vous convient.
Les éléments déjà présents dans votre modèle causal vierge vous permet d'importer des résultats expérimentaux. Pour cela, vous devez
- mettre votre fichier de la mesure exporté dans le même répertoire que le fichier Jupyter « conversion.ipynb »
- renommer votre fichier de données sous le nom « donnees.txt » ou bien de modifier le code du fichier « conversion.ipynb ».
- exécuter « conversion.ipynb »
Que fait le fichier « conversion.ipynb » ? Il permet de
- convertir les données exportées en listes afin que vous puissiez les manipuler à votre convenance pour éventuellement extraire des informations qui vous sembleront utiles.
- afficher des courbes de quelques variables en fonction du temps
- convertir les données dans un format compatible avec « Scilab / Xcos » : scilabXcos.txt
- convertir les données dans un format compatible avec « Matlab /Simulink » : matlabSimulink.xls
Nous vous mettons à disposition le fichier Jupyter permettant d'afficher les données expérimentales exportées.
Déterminer le frottement sec et le frottement visqueux ramenés au moteur.
Déterminer le moment d'inertie équivalent ramené au moteur.
Des données peuvent être volontairement manquantes afin que vous établissiez vous même un modèle simplifié.
Déterminer tous les autres paramètres de votre schéma bloc à partir de la documentation technique.
Valider votre modèle en confrontant les résultats du modèle avec l'expérience.
Appeler votre professeur pour présenter le fruit de votre travail.
Structure de la boucle fermée
Compléter le schéma-bloc en rajoutant
- le capteur
- l'adaptateur de consigne
- le générateur de commande (correcteur) du type proportionnel
Montrer que l'on peut ramener votre schéma sous cette forme.

Cliquer sur l'image pour l'agrandir
Valider votre modèle en confrontant les résultats du modèle avec l'expérience.
Appeler votre professeur pour présenter le fruit de votre travail.
Faire une synthèse des performances actuelles et les comparer à celles du cahier des charges.
Amélioration des performances
Choisir un type de correcteur adapté
Proposer la démarche de réglage d'un correcteur proportionnel, proportionnel intégral ou bien à avance de phase.
Valider votre réglage sur le modèle.
Implanter votre réglage sur le système.
Le comportement est-il celui attendu ?