Séquence 9 : Pont roulant
Présentation du système
Domaine du commanditaire
Le système n'est pas dans le domaine du commanditaire. Le système a été à spécifiquement conçu à des fins pédagogiques.
Domaine du laboratoire

Le « Slider Cam / Pont Roulant » est un système basé sur un chariot à galets, motorisé par un moteur à courant continu intégrant un codeur incrémental.
Les caractéristiques mécaniques sont les suivantes :
- Rail en aluminium de longueur 1 mètre (ce qui donne une course d'environ 82 centimètre)
- Chariot en aluminium de dimension 50 * 50 * 6.35 millimètre
- Entraînement par courroie et poulie crantées
- Déplacement du chariot sur le rail par un système de quatre galets à roulement à billes
- Interrupteur de fin de course à chaque extrémité
Le chariot peut être équipé de deux ensembles :
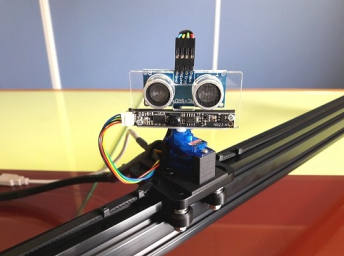
- une tourelle multi-capteurs pour les applications de type « Slider Cam »
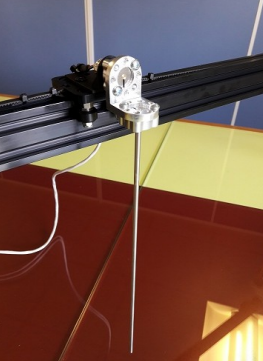
- une tige libre en rotation pour les applications de type « Pont Roulant »
 |
 |
|
Chariot en configuration « Slider Cam » (Equipé d'une Webcam et d'un capteur de distance à ultrason) |
Chariot en configuration « Pont Roulant » (Equipé d'une tige métallique pivotant autour d’un axe horizontal) |
Le pont roulant est fragile. Il est strictement interdit de manipuler/bloquer manuellement le chariot !