Séquence 2 : Capsuleuse de bocaux
Travail préparatoire
Il n'y aura pas de travail préparatoire pour cette séquence.
Environnement nécessaire pour le déroulement de la séquence
Présentation du système
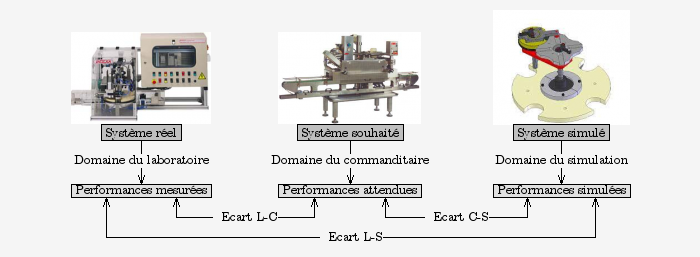
Domaine du commanditaire
|
|
Le conditionnement de nombreux produits alimentaires (condiments, confiture, compote, café soluble, . . . ) est réalisé dans des bocaux en verre fermés par des capsules vissées. Si la variété de produit conditionné induit des systèmes de remplissage différents, la mise en place et le serrage de la capsule restent identiques dans la plupart des cas. |

Domaine du laboratoire
|
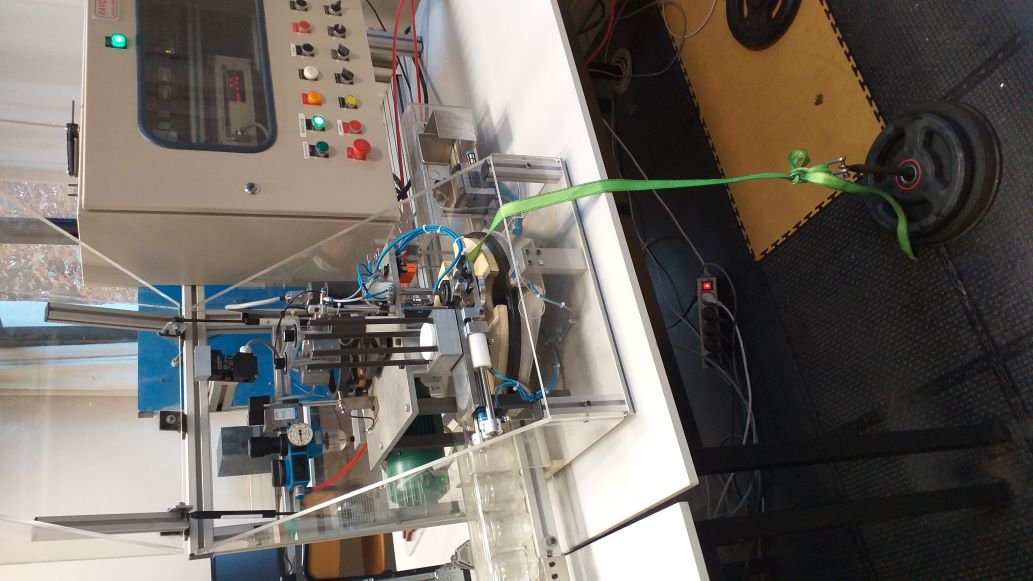
Le système présent dans le laboratoire reprend les caractéristiques énoncées ci-dessus. Sa particularité est d’être équipée d’un système transformation de mouvement par croix de malte. |
|
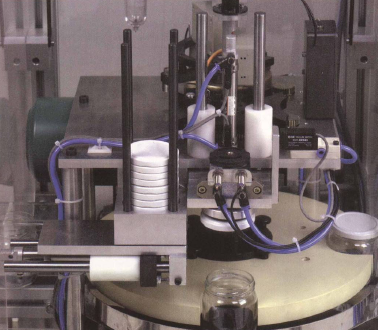
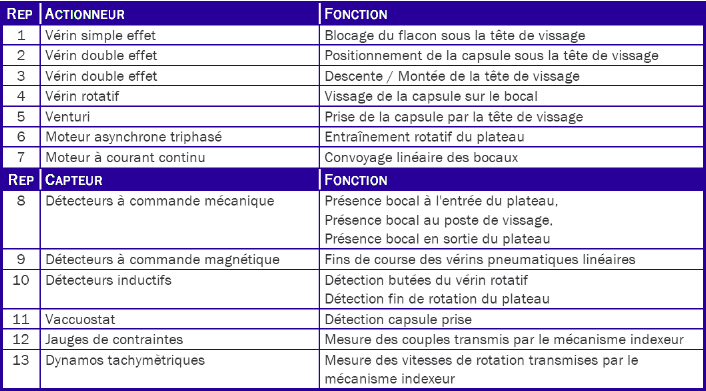
Les différents éléments constitutifs du systèmes sont présentées ci-dessous :
|
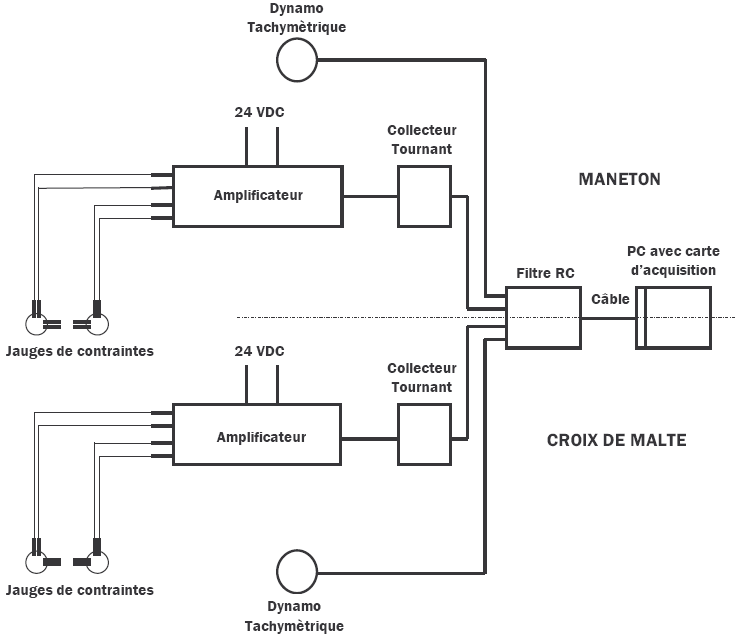
Il est intéressant de pouvoir mesurer certains paramètres relatifs à la croix de malte. Celle-ci à donc été équipé de capteur permettant de mesurer les vitesses et le couples appliqués sur le maneton et sur la croix. |
|
Problématique
La capsuleuse de bocaux est conçue pour fermer le plus rapidement possible un nombre important de bocaux.
Démarche de l'ingénieur
Rôle de chacun des membres de l'équipe
Mission spécifique du groupe expérimentateur
Le groupe expérimentateur doit mettre en oeuvre les compétences suivantes :
 Mettre en oeuvre un système
Mettre en oeuvre un système Proposer et justifier un protocole expérimental
Proposer et justifier un protocole expérimental Mettre en oeuvre un protocole expérimental
Mettre en oeuvre un protocole expérimentalMission spécifique du groupe modélisateur
Le groupe modélisateur doit mettre en oeuvre les compétences suivantes :
 Proposer un modèle de connaissance et de comportement
Proposer un modèle de connaissance et de comportement Proposer une démarche de résolution
Proposer une démarche de résolution Mettre en oeuvre une démarche de résolution analytique
Mettre en oeuvre une démarche de résolution analytique Mettre en oeuvre une démarche de résolution numérique
Mettre en oeuvre une démarche de résolution numériqueMission spécifique au groupe projet
Cela est l’occasion pour que le groupe expérimentateur et le groupe modélisateur confrontent leurs résultats et en tire les conclusions nécessaires sur la démarche de l’ingénieur.
Les groupes projet doivent mettre en oeuvre les compétences suivantes :
 Analyser les performances et les écarts
Analyser les performances et les écarts Choisir les grandeurs physiques et les caractériser
Choisir les grandeurs physiques et les caractériser Produire et échanger de l’information
Produire et échanger de l’informationOrganisation
Modélisation
Modélisation du système par un schéma cinématique minimal
L'objectif est de réaliser le schéma cinématique minimal de la transformation de mouvement étudiée (revoir problématique en retournant en arrière de 3 pages).
Pour cela, nous vous mettons à disposition :
- le système réel lui-même
- la maquette numérique pour voir l'inaccessible
- le document technique
Pour l'utilisation de la maquette numérique, il est impératif de dézipper le fichier téléchargé et d'ouvrir l'assemblage principal dans le dossier décompréssé.
A partir du système réel, du modèle numérique et de la documentation de la technique fournie, réaliser le schéma cinématique.
Paramétrer votre schéma cinématique.
Par l’approche de votre choix (cinématique ou dynamique), déterminer le degré d’hyperstatisme de votre modèle dans l'espace.
Si votre modèle est hyperstatique, proposer un nouveau modèle isostatique.
Étude cinématique
Recherche de la loi entrée sortie
Nous vous incitons sans obligation à utiliser ce schéma cinématique paramétré pour la suite du TP.
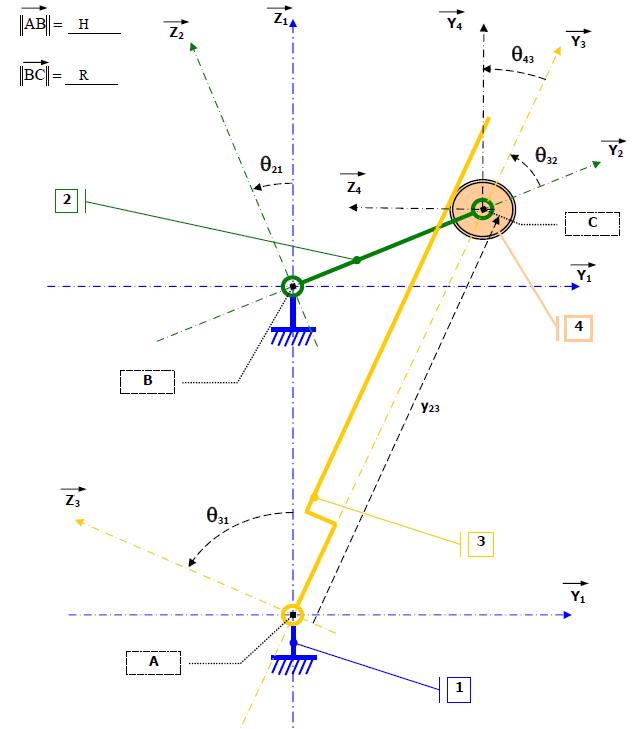
Cliquer sur l'image pour l'aggrandir.
A partir de votre schéma cinématique, déterminer une relation liant le paramètre géométrique d’entrée au paramètre géométrique de sortie du système de transformation de mouvement.
La relation obtenue doit être du type \( loi(entree, sortie, ... ) = 0\).
A l’aide d’un script python, tracer la courbe issue du modèle analytique.
Pour cela, je vous impose de résoudre numériquement la relation obtenue du type \( loi(entree, sortie, ... ) = 0 \).
A partir du modèle du simulateur de comportement Méca3D, déterminer une courbe liant le paramètre géométrique d’entrée au paramètre géométrique de sortie du système de transformation de mouvement.
A l’aide d’un script python, tracer la courbe issue du modèle numérique.
Réaliser toutes les expériences nécessaires permettant de déterminer une courbe liant le paramètre géométrique d’entrée au paramètre géométrique de sortie du système de transformation de mouvement.
Vous prendrez soin d’identifier les capteurs utilisés lors de l’acquisition.
A l’aide d’un script python, tracer un nuage de points pour les valeurs expérimentales.
A l’aide des scripts python, superposer les 3 courbes.
Que pouvez vous conclure à partir de ces courbes ?
Étude statique
On échange maintenant les rôles !
- les expérimentateurs deviennent les modélisateurs.
- les modélisateurs deviennent les expérimentateurs.
On cherche maintenant à faire une étude statique du système de transformation de mouvement.
Afin de vous y aider, nous vous proposons un fichier python permettant d'avoir dans chaque position du modèle du schéma cinématique proposé
de connaître les valeurs de toutes les paramètres géométriques variants.
Il sera nécessaire de créer volontairement une action mécanique résistante. Pour cela, vous utiliserez le mécanisme ainsi :
Recherche des Actions mécaniques transmises par le système
A partir de votre schéma cinématique,
- déterminer le couple moteur entrainant le mécanisme en fonction du paramètre géométrique d’entrée ou du sortie selon votre convenance.
ou bien
- déterminer une relation entre le rapport du couple du moteur entrainant le mécanisme sur l’Action Mécanique disponible en sortie de mécanisme en fonction du paramètre géométrique d’entrée ou du sortie selon votre convenance.
Il vous appartient de faire le choix le plus pertinent.
A partir du modèle du simulateur de comportement Méca3D,
- déterminer une courbe du couple moteur entrainant le mécanisme en fonction du paramètre géométrique d’entrée ou du sortie selon votre convenance.
ou bien
- déterminer une courbe entre le rapport du couple du moteur entrainant le mécanisme sur l’Action Mécanique disponible en sortie de mécanisme en fonction du paramètre géométrique d’entrée ou du sortie selon votre convenance.
Il vous appartient de faire le choix le plus pertinent.
Réaliser toutes les expériences nécessaires permettant de
- tracer une courbe du couple moteur entrainant le mécanisme en fonction du paramètre géométrique d’entrée ou du sortie selon votre convenance.
ou bien
- tracer une courbe entre le rapport du couple du moteur entrainant le mécanisme sur l’Action Mécanique disponible en sortie de mécanisme en fonction du paramètre géométrique d’entrée ou du sortie selon votre convenance.
Il vous appartient de faire le choix le plus pertinent.
Vous prendrez soin d’identifier les capteurs utilisés lors de l’acquisition.
A l’aide des scripts python, superposer les 3 courbes.
Que pouvez vous conclure à partir de ces courbes ?