Séquence 2 : Capsuleuse de bocaux
Étude cinématique
Recherche de la loi entrée sortie
Nous vous incitons sans obligation à utiliser ce schéma cinématique paramétré pour la suite du TP.
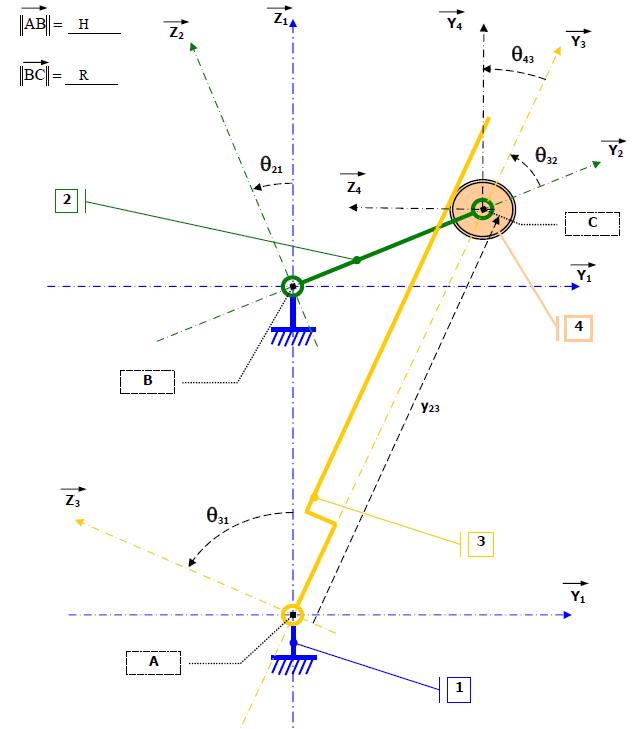
Cliquer sur l'image pour l'aggrandir.
A partir de votre schéma cinématique, déterminer une relation liant le paramètre géométrique d’entrée au paramètre géométrique de sortie du système de transformation de mouvement.
La relation obtenue doit être du type \( loi(entree, sortie, ... ) = 0\).
A l’aide d’un script python, tracer la courbe issue du modèle analytique.
Pour cela, je vous impose de résoudre numériquement la relation obtenue du type \( loi(entree, sortie, ... ) = 0 \).
A partir du modèle du simulateur de comportement Méca3D, déterminer une courbe liant le paramètre géométrique d’entrée au paramètre géométrique de sortie du système de transformation de mouvement.
A l’aide d’un script python, tracer la courbe issue du modèle numérique.
Réaliser toutes les expériences nécessaires permettant de déterminer une courbe liant le paramètre géométrique d’entrée au paramètre géométrique de sortie du système de transformation de mouvement.
Vous prendrez soin d’identifier les capteurs utilisés lors de l’acquisition.
A l’aide d’un script python, tracer un nuage de points pour les valeurs expérimentales.
A l’aide des scripts python, superposer les 3 courbes.
Que pouvez vous conclure à partir de ces courbes ?